21 SOCP
Second-Order Cone Programming
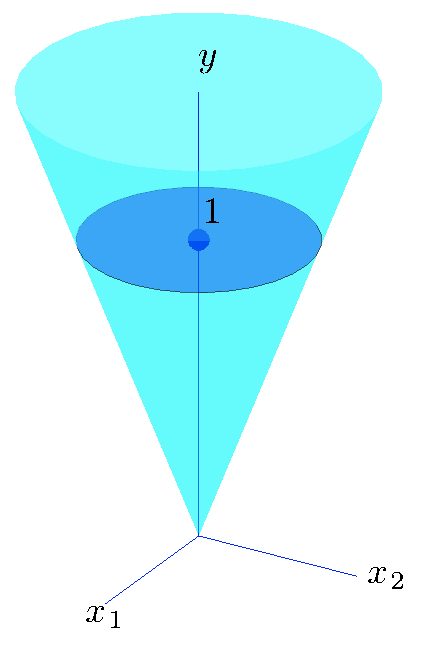
The second-order cone in  is the set of vectors
is the set of vectors  with
with  . The picture shows part of the cone, and a slice (at
. The picture shows part of the cone, and a slice (at  ). For some strange reason, this set is called an ‘‘ice-cream cone’’.
). For some strange reason, this set is called an ‘‘ice-cream cone’’.
Second-order cone programming (SOCP) is a generalization of linear and quadratic programming that allows for an affine combination of variables to be constrained inside second-order cones. The SOCP model includes special cases problems with convex quadratic objectives and constraints.
SOCP models are particularly useful in geometry problems, as well as in linear programs where the data is imprecisely known. We explore this further here.
 -norm trick
-norm trick