Definitions
- Symmetric matrices and quadratic functions
- Second-order approximation of non-linear functions
- Special symmetric matrices
Symmetric matrices and quadratic functions
Symmetric matrices
A square matrix  is symmetric if it is equal to its transpose. That is,
is symmetric if it is equal to its transpose. That is,

The set of symmetric  matrices is denoted
matrices is denoted  . This set is a subspace of
. This set is a subspace of  .
.
Examples:
- A
 example.
example. - Representation of a weighted, undirected graph.
- Laplacian matrix of a graph.
- Hessian of a function.
- Gram matrix of data points.
Quadratic functions
A function  is said to be a quadratic function if it can be expressed as
is said to be a quadratic function if it can be expressed as

for numbers  ,
,  , and
, and  ,
,  . A quadratic function is thus an affine combination of the
. A quadratic function is thus an affine combination of the  ‘s and all the ‘‘cross-products’’
‘s and all the ‘‘cross-products’’  . We observe that the coefficient of is
. We observe that the coefficient of is  .
.
The function is said to be a quadratic form if there are no linear or constant terms in it:  ,
,  .
.
Note that the Hessian (matrix of second-derivatives) of a quadratic function is constant.
Examples:
Link between quadratic functions and symmetric matrices
There is a natural relationship between symmetric matrices and quadratic functions. Indeed, any quadratic function can be written as

for an appropriate symmetric matrix  , vector
, vector  and scalar
and scalar  . Here,
. Here,  is the coefficient of
is the coefficient of  in
in  ; for
; for  ,
,  is the coefficient of the term in ;
is the coefficient of the term in ;  is that of ; and is the constant term,
is that of ; and is the constant term,  . If is a quadratic form, then
. If is a quadratic form, then  , , and we can write
, , and we can write  where now .
where now .
Examples:
Second-order approximations of non-quadratic functions
We have seen how linear functions arise when one seeks a simple, linear approximation to a more complicated non-linear function. Likewise, quadratic functions arise naturally when one seeks to approximate a given non-quadratic function by a quadratic one.
One-dimensional case
If  is a twice-differentiable function of a single variable, then the second-order approximation (or, second-order Taylor expansion) of
is a twice-differentiable function of a single variable, then the second-order approximation (or, second-order Taylor expansion) of  at a point
at a point  is of the form
is of the form

where  is the first derivative, and
is the first derivative, and  the second derivative, of at . We observe that the quadratic approximation has the same value, derivative, and second-derivative as , at .
the second derivative, of at . We observe that the quadratic approximation has the same value, derivative, and second-derivative as , at .
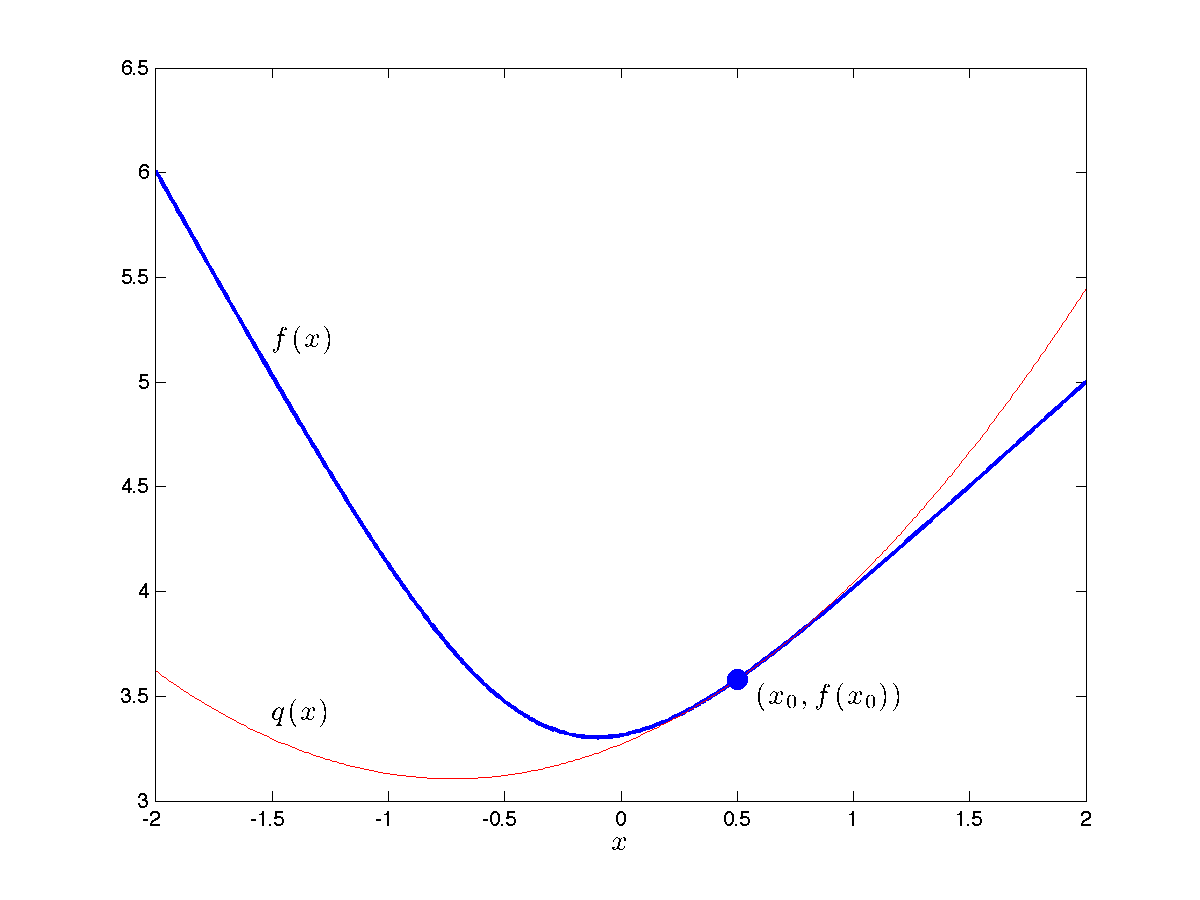 |
Example: The figure shows a second-order approximation of the univariate function  , with values , with values
 at the point |
 (in red).
(in red).Multi-dimensional case
In multiple dimensions, we have a similar result. Let us approximate a twice-differentiable function  by a quadratic function , so that and coincide up and including to the second derivatives.
by a quadratic function , so that and coincide up and including to the second derivatives.
The function must be of the form

where , , and . Our condition that coincides with up and including to the second derivatives shows that we must have

where  is the Hessian, and
is the Hessian, and  the gradient, of at .
the gradient, of at .
Solving for  we obtain the following result:
we obtain the following result:
Second-order expansion of a function. The second-order approximation of a twice-differentiable function at a point is of the form

where  is the gradient of at , and the symmetric matrix is the Hessian of at .
is the gradient of at , and the symmetric matrix is the Hessian of at .
Example: Second-order expansion of the log-sum-exp function.
Special symmetric matrices
Diagonal matrices
Perhaps the simplest special case of symmetric matrices is the class of diagonal matrices, which are non-zero only on their diagonal.
If  , we denote by
, we denote by  , or
, or  for short, the (symmetric) diagonal matrix with
for short, the (symmetric) diagonal matrix with  on its diagonal. Diagonal matrices correspond to quadratic functions of the form
on its diagonal. Diagonal matrices correspond to quadratic functions of the form

Such functions do not have any ‘‘cross-terms’’ of the form with .
Example: A diagonal matrix and its associated quadratic form.
Symmetric dyads
Another important class of symmetric matrices is that of the form  , where
, where  . The matrix has elements
. The matrix has elements  and is symmetric. Such matrices are called symmetric dyads. (If
and is symmetric. Such matrices are called symmetric dyads. (If  , then the dyad is said to be normalized.)
, then the dyad is said to be normalized.)
Symmetric dyads correspond to quadratic functions that are simply squared linear forms:  .
.
Example: A squared linear form.