Part 6 – Motor Protection Devices
Motor Protection
Larger motors, used for power station auxiliaries and in industry, are protected against the following:
- Stator overheating
- Stator faults
- Overload and locked rotor (stalling)
- Unbalanced phase currents
- Undervoltage and underfrequency
- Maximum starts overtime
Stator Overheating Protection
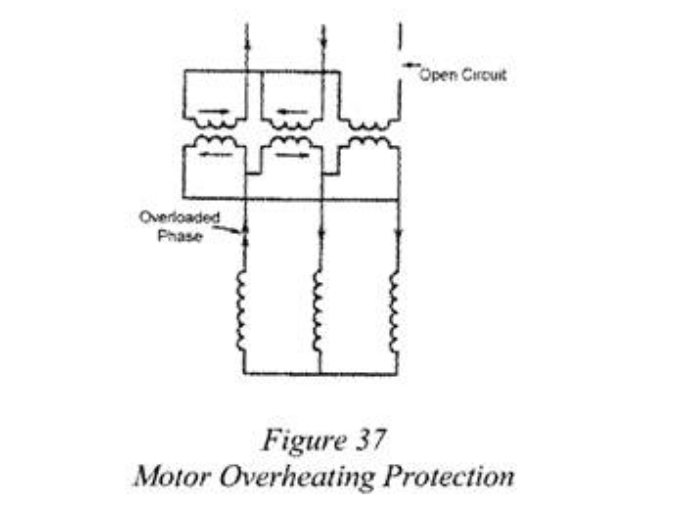
Caused by overload, stalled rotor, or unbalanced stator currents. Three-phase motors should have an overload element in each phase.
**Skipped in slide show mode (section below)**
Non-Essential Service Motors
Motors rated at 1100 kW and below have elements in only two phases based on the assumption that the open-phase condition will be detected and corrected before the motor can overheat. These overload elements consist of the following:
- Replica type thermal-overload relays
- Long-time inverse-time overcurrent relays
- Direct-acting tripping devices to disconnect the motor from its power source
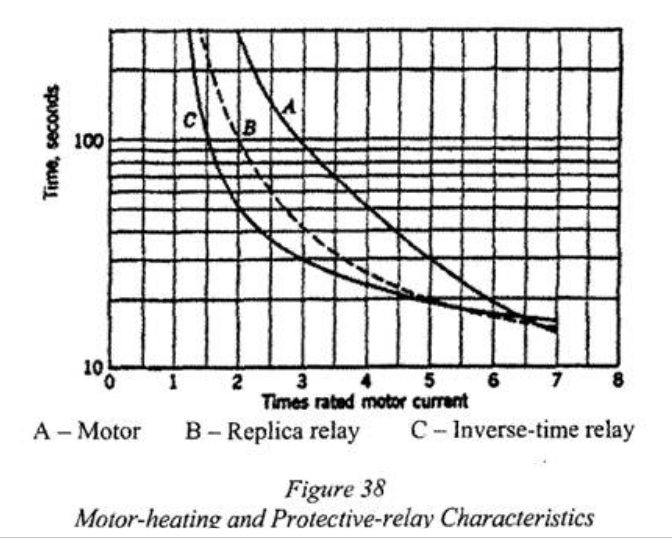
As shown in Figure 38, the replica type overload element provides the best protection as its time-current characteristic nearly matches the heating characteristic of a motor over the full range of overcurrent, Referring to Fig. 38, the inverse-time overcurrent relay will tend to overprotect at low currents and underprotect at high currents.
**Skipped in slide show mode (section above)**
Motors above 1100 kW are provided with resistance temperature detectors (RTDs) embedded in the stator slots between the windings. A single relay operating from these detectors is used instead of a replica type or inverse-time-overcurrent relays. Single-phase motors only require an element in one of the two conductors.
Essential Service Motors
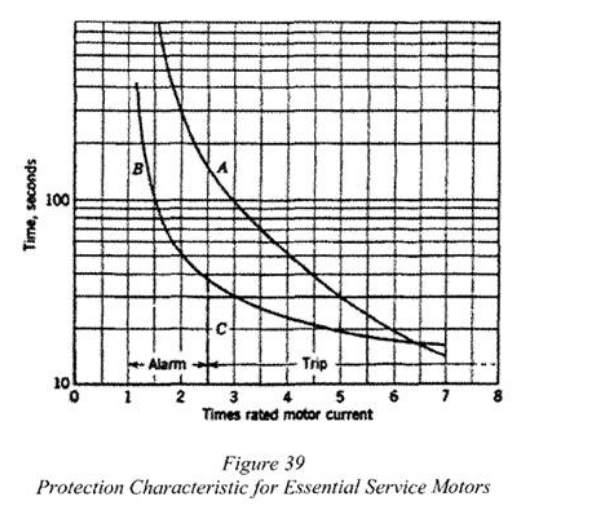
The protection of essential service motors is determined by minimizing unnecessary motor trips. A long-time inverse-time overcurrent relay actuates an audible alarm and leaves tripping the motor in the control of an operator.
**Skipped in slide show mode (image below)**
Stator Faults
DC overcurrent tripping devices on the breaker take care of faults to ground or between phases; thermal or dashpot types provide an instantaneous trip at high current. On large motors above 50 kW, instantaneous overcurrent relays supplied from current transformers are more common; two in the phases and one in the residual circuit.
**Skipped in slide show mode (section below)**
The phase relays have to be set well above the starting current. Latest type can give a more reasonable setting because it is not affected by the DC component of the inrush current. Fuses are used for protecting smaller motors, but they involve the risk of leaving the motor connected to a single-phase supply. For stator faults, thermal overload relays with instantaneous overcurrent relays usually comprise the main protection. The instantaneous overcurrent relays are usually set very high because they have to surmount the high-starting current of the motor, but they are valuable for clearing winding and terminal faults.
Overload and Locked Rotor (Stalling)
A motor heats according to an I2t function. Protection is provided by thermal overcurrent relays using bimetallic spiral movements.
Overload Relays
Work on principle that motor load (and therefore motor temperature) is directly related to the current drawn by the motor. Current flowing from the motor contactor to the motor passes through the motor overload heaters (one per phase). If the motor current exceeds the desired value, the heat produced by the motor overload heater will cause a control circuit contact in the overload block to open, drop out the contactor coil, and stop the motor.
A motor heats according to an I2t function. Protection is provided by thermal overcurrent relays using bimetallic spiral movements.
Work on principle that motor load (and therefore motor temperature) is directly related to the current drawn by the motor. Current flowing from the motor contactor to the motor passes through the motor overload heaters (one per phase). If the motor current exceeds the desired value, the heat produced by the motor overload heater will cause a control circuit contact in the overload block to open, drop out the contactor coil, and stop the motor.
The slow reset of these relays prevents restarting the motor until it has cooled.
Unbalanced Phase Currents
Uses three bimetallic spirals energized by currents from the three phases. Contacts are arranged so that if any spiral moves differently from the others due to more than 12% unbalance, contacts meet and trip the supply breaker. The same spirals also provide overload protection.
Undervoltage and Underfrequency
Running on undervoltage causes overcurrent which in turn causes overload or temperature relays to trip. It is usual to provide undervoltage protection which has an inverse time characteristic which overrides temporary voltage drops.
Maximum Starts Over Time Protection
Repeated starts can build up temperatures to dangerously high values in either stator or rotor windings unless enough time is provided to allow the heat to dissipate.