8 Détection des changements
De nombreux changements environnementaux se produisent à des échelles temporelles et spatiales qui rendent leur étude difficile et potentiellement coûteuse. Parmi les exemples évidents, citons certaines des manifestations du changement climatique : l’augmentation des températures et la fonte des glaces dans l’Arctique, ainsi que les changements subtils de la végétation dans tout le Canada, pour n’en citer que quelques-uns. Surveiller ces phénomènes exclusivement à l’aide de mesures sur le terrain serait incroyablement coûteux, ou fortement biaisé vers les zones peuplées et, lorsque des mesures historiques ne sont pas disponibles, impossible. Les données de télédétection viennent ici à la rescousse, car la photographie aérienne et l’imagerie satellitaire sont régulièrement stockées et cataloguées et elles peuvent donc fonctionner comme des données du passé et du présent — pourvu que nous puissions en extraire l’information nécessaire. Imaginez simplement répondre à ces questions en toute confiance sans avoir accès aux données de télédétection :
- La superficie annuelle brûlée par les feux de forêt est-elle en hausse ou en baisse au Canada ?
- Quelle partie du Canada se réchauffe le plus rapidement ?
- Où y a-t-il encore de la glace pluriannuelle dans l’Arctique, et à quelle vitesse cette superficie se diminue-t-elle ?
Avant de commencer à utiliser les données de télédétection pour détecter les changements environnementaux, il est utile d’examiner ce que nous entendons par là — qu’est-ce que un changement environnemental ? L’environnement change en tout temps — il neige dehors au moment où j’écris ces lignes alors qu’il n’y avait pas de neige il y a deux jours. C’est un type de changement environnemental, mais pas celui que la plupart des gens veulent détecter et cartographier avec des données de télédétection. Néanmoins, c’est exactement ce type de changement qui est visible sur les images de la Terre prises depuis l’espace, donc, que nous le voulions ou non, nous détectons beaucoup de changements non pertinents avec les données de télédétection. Pour mieux réfléchir aux changements que nous voulons détecter et à ceux que nous ne voulons pas détecter, une distinction utile à faire est celle entre les changements à court terme/instantanés et les changements à long terme/graduels. Parfois, nous souhaitons à trouver le changement à court terme, alors qu’à d’autres moments, lorsque nous sommes plus concernés par les tendances graduelles à long terme, nous considérons qu’il s’agit de bruit.
Changement instantané
La télédétection peut être efficace pour détecter un changement instantané, c’est-à-dire un changement qui se produit entre une acquisition d’image et la suivante. Ce changement n’est pas nécessairement instantané au sens strict du terme, mais pour des raisons pratiques de télédétection, un changement qui se produit entre deux acquisitions d’images peut être considéré comme « instantané ». La détection d’un tel changement se fait souvent assez facilement par l’interprétation visuelle de deux images, en les comparant côte à côte pour identifier facilement les zones de changement. Un exemple de ce type de comparaison est présenté à la figure 63, qui montre les changements survenus dans une zone urbaine de Taïwan entre février (à gauche) et décembre (à droite) 2002. La végétation (zones rouges) a clairement changé à certains endroits, de même que certaines autres zones. De nombreux algorithmes de traitement d’images ont également été développés à cette fin, afin d’automatiser le processus de recherche des zones qui ont changé ; nous les examinerons plus loin dans ce chapitre.
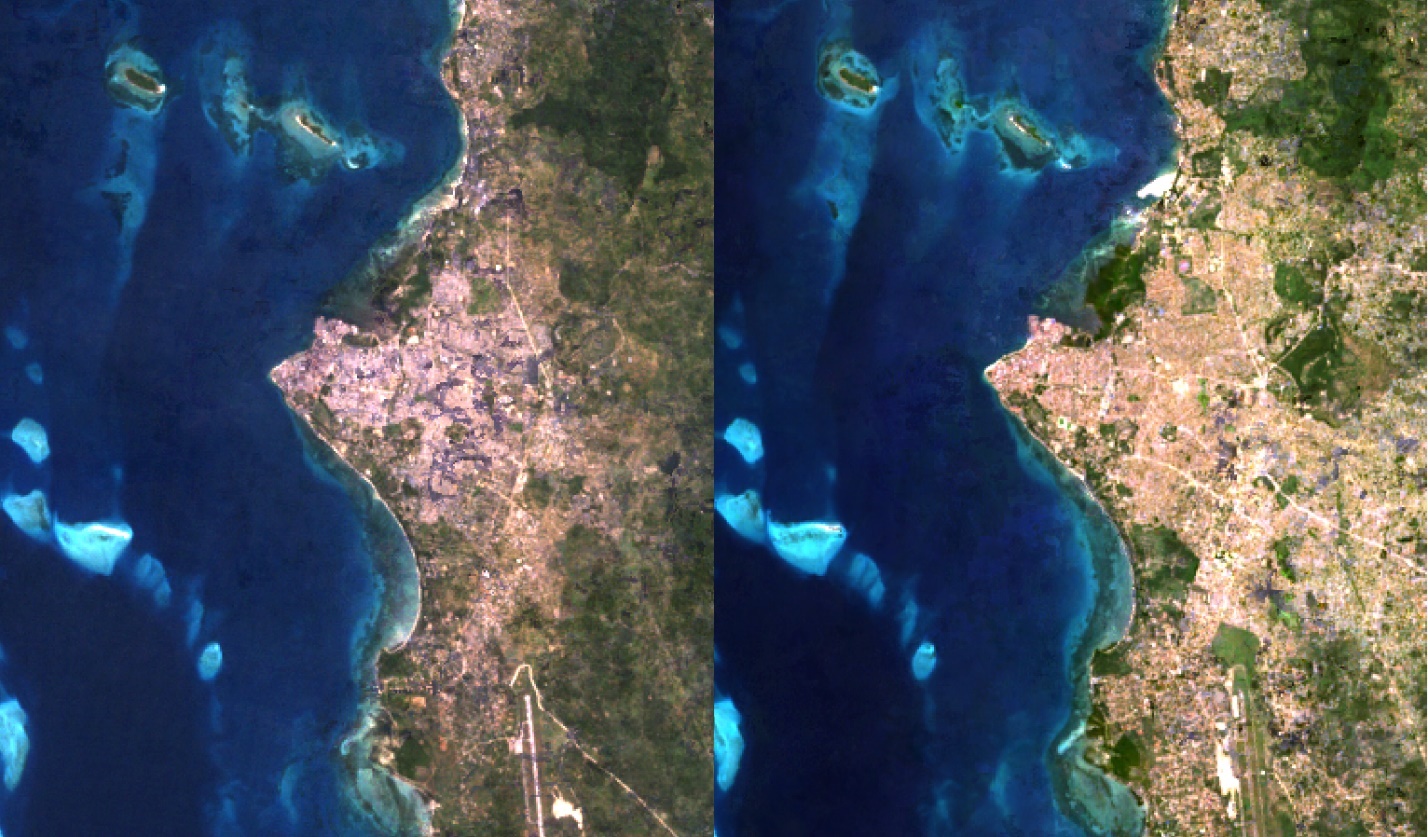
Figure 63: Exemple de comparaison côte à côte de deux images montrant la ville de Zanzibar en 1995 (à gauche) et en 2020 (à droite). L’expansion urbaine qui s’est produite dans la période entre l’acquisition des deux images peut être identifiée visuellement ou algorithmiquement. Par Anders Knudby, CC BY 4.0.
Changement progressif
La comparaison visuelle ou autre entre images peut être efficace pour mettre en évidence des changements abrupts évidents tels que ceux causés par le développement urbain, les glissements de terrain, les feux de forêt, etc. Cependant, les changements plus subtils, tels que les variations annuelles ou décennales de l’humidité du sol ou de la santé de la végétation, ou les changements dans l’épaisseur du manteau neigeux en hiver, nécessitent souvent une approche différente de la détection des changements, une approche qui repose sur l’analyse quantitative des changements observés sur de nombreuses images. C’est particulièrement le cas lorsque des changements individuels d’une image à l’autre peuvent masquer la tendance à long terme plus graduelle en raison de schémas météorologiques ou saisonniers. Par exemple, pour étudier comment le changement climatique affecte les modèles de végétation dans l’Arctique canadien, la comparaison de deux images fournit, au mieux, un instantané des années dont ces images sont issues, et au pire, elle nous dit simplement qu’il y a plus de végétation en 2002 (août) qu’en 1994 (février), ce qui n’a rien à voir avec un changement entre les deux années, mais est plutôt une fonction du moment de l’année où chaque image a été acquise. Quoi qu’il en soit, ces comparaisons d’image à image ne nous renseignent pas beaucoup sur la tendance à long terme. Pour détecter de telles tendances, il faut plutôt quantifier une mesure de la variable d’intérêt (par exemple, la densité ou la santé de la végétation) à intervalles réguliers sur une longue période. Un exemple est fourni par la figure 64, dans laquelle l’étendue de la glace de mer arctique a été quantifiée sur une base quasi quotidienne pour la période 1979 – 2018.
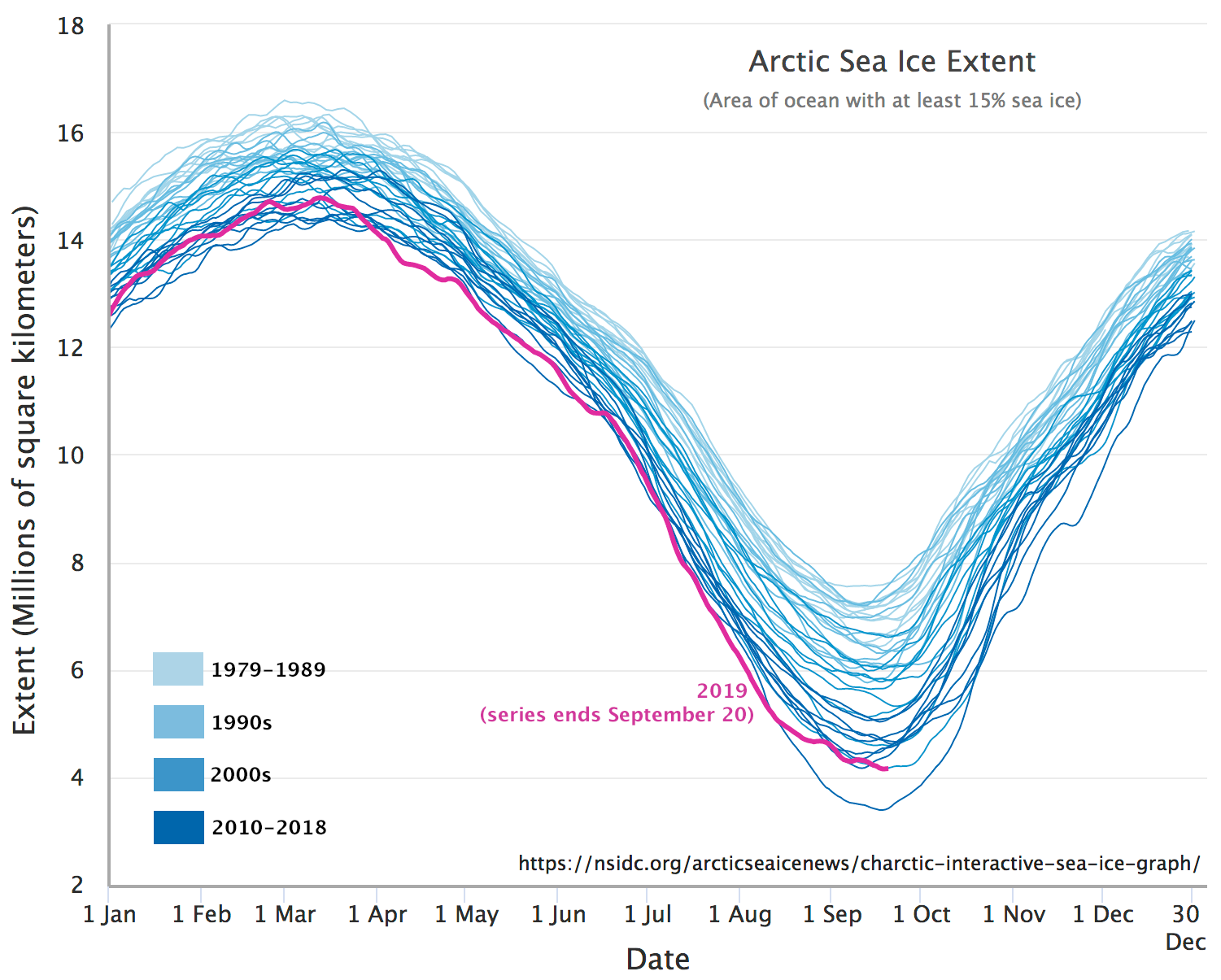
Figure 64: Estimation quasi quotidienne de l’étendue de la glace de mer arctique. Arctic Sea Ice Extent par M. Scott, National Snow & Ice Data Center (NSIDC), NSIDC Use and Copyright.
La méthodologie spécifique utilisée pour détecter un changement graduel à long terme dépend entièrement du type de changement en question (par exemple, la végétation par rapport au changement de la glace de mer), il est donc difficile de fournir des détails sur la façon de procéder pour détecter un changement dans ce cas. Cependant, l’une des principales préoccupations de ce type de « détection des tendances » est que l’estimation (par exemple, l’étendue de la glace de mer) doit être relativement non biaisée tout au long de la période d’observation. En d’autres termes, l’étendue de la glace de mer ne doit pas être sous-estimée ou surestimée au cours de la période 1979-1989, et ne doit pas non plus être sous-estimée ou surestimée au cours des années 2010 ni à aucun moment entre les deux. Ceci est important pour éviter de « détecter » des tendances qui sont dues à un biais dans l’acquisition ou le traitement des données, mais qui n’existent pas en réalité.
Séparer le bruit du changement instantané réel
Lorsque l’on compare des images dans le but de détecter des changements entre elles, le principal défi consiste à détecter un changement environnemental réel tout en évitant de détecter un changement qui ne s’est pas produit. Comme c’est toujours le cas dans la classification binaire (dont ceci est un exemple), il existe quatre combinaisons possibles de la réalité (changement ou pas de changement) et de l’estimation (changement détecté vs pas de changement détecté, tableau 14) :
Tableau 14: Une classification binaire (qui implique deux options catégorielles) peut être décrite à l’aide d’un tableau comme celui-ci. Pour tout système de traitement d’images, le défi de la classification binaire est d’optimiser le nombre/taux de vrais positifs et de vrais négatifs.
|
|
Change detected |
No change detected |
|
Change |
True positive (TP) |
False negative (FN) |
|
No change |
False positive (FP) |
True negative (TN) |
L’objectif est donc d’optimiser le taux de détection des vrais positifs et des vrais négatifs. La plupart des algorithmes de détection des changements fonctionnent pixel par pixel, ce qui signifie qu’il faut détecter correctement les pixels qui ont réellement changé sans « détecter » incorrectement les changements dans les pixels qui n’ont pas changé. Pour ce faire, nous avons besoin d’un moyen de séparer trois situations différentes, chacune pouvant se produire dans un pixel donné :
- Pas de changement : le pixel est exactement le même dans chaque image.
- Bruit : Le pixel semble différent dans les deux images, mais la différence est suffisamment faible pour qu’elle soit probablement causée par des facteurs non liés à un changement environnemental réel. Il peut s’agir de différences dans les conditions atmosphériques entre les deux images, de bruit aléatoire dans les images, d’un géoréférencement imparfait et d’autres problèmes.
- Changement réel : Un changement environnemental réel s’est produit dans le pixel, et il se manifeste par une différence substantielle entre l’aspect du pixel dans la première image et dans la deuxième image.
La première situation, « aucun changement », se produit très rarement, car il existe un bruit inhérent au processus de création de l’image, et il est peu probable que ce bruit soit identique entre deux images différentes. Le véritable défi consiste donc à séparer les situations 2) et 3). Pour ce faire, deux principes sont en jeu.
Réduction du bruit
Tout d’abord, il est important d’éliminer autant de sources de bruit que possible avant de comparer les données des deux images. Voici quelques stratégies souvent employées à cette fin :
- Utilisez les « dates anniversaires ». Choisissez deux images qui ont été capturées à la même date (ou presque) dans des années différentes. C’est un bon moyen d’éliminer les grandes différences entre chaque image liée aux changements saisonniers de l’humidité du sol, de l’état de la végétation, de la couverture neigeuse et d’autres facteurs environnementaux qui changent avec les saisons.
- Utilisez des images capturées par le même capteur. Étant donné qu’aucun capteur n’est parfaitement calibré, l’utilisation d’images provenant de deux capteurs différents peut potentiellement introduire une différence qui est liée au capteur plutôt qu’à l’environnement. Par exemple, si la radiance dans le spectre 500-600 nm est légèrement surestimée par un capteur et légèrement sous-estimée par un autre, la comparaison des images entre les deux peut » détecter un changement » là où il n’y en a pas.
- Utilisez des images capturées dans des conditions atmosphériques similaires. Cela est difficile, car nous ne disposons souvent pas d’informations précises sur les charges d’aérosols, la vapeur d’eau, la vitesse du vent, etc., mais évitez absolument de comparer des images présentant des différences évidentes de brume, de visibilité et d’autres facteurs atmosphériques visibles.
- Comparez les images en fonction de leur réflectance de surface plutôt que de la radiance ou de la réflectance du TOA. En effet, la réflectance de la surface est un attribut physique de la surface et est, au moins en principe, indépendant de l’état atmosphérique et de l’illumination.
- Pour les capteurs inclinables, comparez si possible des images prises à peu près à la même géométrie.
Identification d’un seuil
Une fois que le plus grand nombre possible de sources de bruit a été éliminé et que les images ont été converties en réflectance de surface pour la comparaison, il y aura toujours un certain bruit qui fera que les valeurs de réflectance de surface dans les deux images différeront légèrement entre les images, même pour les pixels qui n’ont pas subi le type de changement que nous voulons détecter. Pour séparer les situations 2) et 3) ci-dessus, il est donc important de considérer ce que signifie un changement environnemental « réel » et de définir un seuil en dessous duquel tout « changement » observé dans la comparaison d’images est considéré comme du « bruit » plutôt que comme un « changement réel ». Par exemple, imaginez que vous étudiez les changements dans la végétation et que vous disposez de deux images de la même forêt. Le changement réel qui s’est produit entre ces deux images est qu’une feuille est tombée d’un des arbres de la forêt. Il s’agit d’un changement réel observable dans l’environnement, mais qui ne justifie en aucun cas l’appellation de « déforestation » ! Une condition préalable à la séparation des situations 2) et 3) ci-dessus est donc de définir le degré de changement nécessaire pour que vous puissiez considérer la zone comme « modifiée ». À moins de disposer d’observations sur le terrain (et ce n’est généralement pas le cas, car le changement est détecté à rebours dans le temps et il est impossible d’aller chercher des données sur le terrain dans le passé), il faut définir le seuil sur la base des images elles-mêmes, ce qui est généralement un processus interactif et subjectif.
Méthodes de détection d’un changement instantané
Certaines des approches les plus simples pour détecter l’ampleur d’un changement sont basées sur les « mathématiques de l’image ».
Différence de bande
Par exemple, l’ampleur du changement peut être définie comme la différence entre les valeurs de réflectance de surface dans la bande 1 des deux images, plus la différence dans la bande 2, etc. :
Ratio de bande
On peut aussi utiliser des ratios à la place des différences :
Distance euclidienne
Une méthode plus couramment utilisée consiste à calculer la « distance euclidienne », en utilisant chaque bande comme une dimension et chaque image comme un point. Imaginez que vous traciez les réflectances de surface de chaque image comme des points dans un système de coordonnées. La distance euclidienne entre eux serait alors égale à :
Pour chacune de ces approches, afin de séparer le bruit des véritables changements environnementaux, une valeur seuil devra être définie. Les pixels qui n’ont subi aucun changement ou un changement inférieur à la valeur seuil seront alors considérés comme effectivement « inchangés », tandis que ceux qui ont subi un changement plus important seront considérés comme contenant un « changement réel ». Notez également que pour chacune de ces approches, le nombre de bandes impliquées dans le calcul a été limité à deux dans les équations ci-dessus, mais peut être étendu pour inclure n’importe quel nombre de bandes présentes dans les images.
Méthodes pour détecter et attribuer un changement instantané
Les trois approches ci-dessus peuvent être efficaces pour détecter les changements, mais elles présentent également l’inconvénient de nous renseigner très peu sur le type de changement qui s’est produit dans un pixel donné. Si la détection d’un changement est une excellente première étape, il n’est pas facile de fonder des décisions de gestion sur cette information. Il est donc utile d’en savoir un peu plus sur le type de changement qui a été détecté, ce que l’on appelle l’attribution du changement.
Vecteurs de changement
Les vecteurs de changement peuvent y contribuer. L’analyse des vecteurs de changement est une prolongation du calcul de la distance euclidienne, dans laquelle la direction du changement est également calculée. La figure 65 donne un exemple avec seulement deux dimensions. Dans l’image » avant « , la valeur de réflectance de la surface dans la bande 1 est de 0,1, et la valeur NDVI est de 0,5. Dans l’image » après « , ces valeurs sont passées respectivement à 0,3 et -0,2. Ceci illustre deux choses : 1) il n’est pas nécessaire d’utiliser les valeurs réelles des bandes comme entrées dans les analyses de détection des changements, et 2) la direction du changement – augmentation de la réflectance de la bande 1, diminution du NDVI, peut être trouvée.
Dans l’analyse du vecteur de changement, l’ampleur du changement est calculée comme la distance euclidienne, selon l’équation ci-dessus. La direction du changement peut être calculée en degrés (par exemple, la direction de la boussole) ou, pour faciliter l’interprétation, en directions principales : À) haut et droite, B) bas et droite, C) bas et gauche, D) haut et gauche. Si les “bandes” utilisées peuvent être interprétées de manière importantes, l’attribution du changement peut être facile. Les changements qui entraînent une diminution de l’indice de végétation impliquent une perte de végétation, tandis que ceux qui conduisent à une augmentation, par exemple, de la température de surface impliquent, eh bien, une augmentation de la température de surface (ces deux phénomènes vont souvent de pair, car la végétation contribue à maintenir une surface fraîche). Si le calcul de la distance euclidienne est facile lorsque plus de deux dimensions sont utilisées dans l’analyse du vecteur de changement — il suffit d’étendre l’équation pour qu’elle contienne davantage de termes — la direction du changement devient plus difficile à définir et les catégories sont généralement développées pour une application spécifique. Comme pour les méthodes utilisées simplement pour détecter le changement, un seuil peut être appliqué à la magnitude du vecteur de changement, en dessous duquel “aucun changement” n’est détecté.
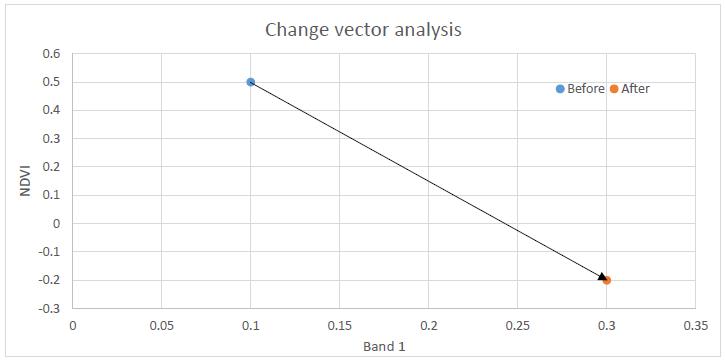
Figure 65: Exemple d’analyse du vecteur de changement avec seulement deux bandes. NDVI est l’indice de végétation par différence normalisée, décrit plus en détail dans le chapitre suivant. Anders Knudby, CC BY 4.0.
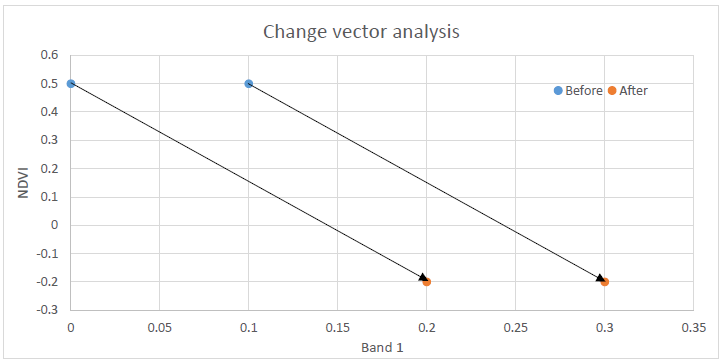
Figure 66: Un inconvénient de l’analyse des vecteurs de changement est que deux vecteurs de changement identiques peuvent représenter des types de changement différents. Anders Knudby, CC BY 4.0.
L’un des inconvénients de l’analyse du vecteur de changement est que deux changements différents peuvent avoir exactement le même vecteur de changement. Par exemple, regardez les deux flèches de la figure 66. Bien que les deux vecteurs soient identiques — ils ont la même direction et la même magnitude — ils sont susceptibles de représenter différents types de changement, car ils commencent et se terminent à des endroits différents. Il est donc difficile, voire impossible dans la pratique, d’utiliser l’analyse des vecteurs de changement pour déterminer spécifiquement ce qu’était la surface avant et après le changement.
Détection des changements post-classification
La façon la plus simple de détecter et d’attribuer un changement dans une zone est probablement de réaliser une classification de l’occupation du sol sur l’image “avant”, de réaliser une autre classification de l’occupation du sol sur l’image “après”, puis de trouver les pixels qui ont été classés différemment dans les deux images. Bien que cette méthode soit simple et attrayante, et qu’elle puisse fonctionner occasionnellement, elle présente un inconvénient majeur : il est très difficile de produire des résultats précis de cette manière. La raison en est qu’aucune classification n’est parfaite, et que lorsque l’on compare deux classifications imparfaites, les erreurs se combinent. Je suggère donc fortement d’éviter cette approche.
Classification des changements
Si vous voulez vraiment savoir quelle était la zone modifiée avant et après le changement, une autre possibilité à la détection de changement post-classification consiste à combiner toutes les bandes des deux images en une seule image. Par exemple, si vous avez deux images, chacune avec six bandes, vous pouvez les » empiler » pour obtenir une seule image à 12 bandes. Cela vous permet d’effectuer une seule classification sur l’image à 12 bandes. Avec de bonnes données de terrain pour calibrer cette classification, chaque classe peut être définie en fonction de la combinaison des couvertures terrestres avant et après. La classification peut être supervisée ou non supervisée, basée sur les pixels ou sur les segments. Cette approche permet aux deux vecteurs de la figure 66 de se retrouver dans deux classes différentes, l’une pouvant correspondre au passage d’une forêt de conifères à un marais et l’autre à un passage d’une forêt de feuillus à une tourbière.
La classification des changements vous permet également de supprimer les combinaisons de classes qui sont impossibles ou hautement improbables, comme le passage de « océan » à « forêt de conifères », ou de « industrie » à « zone humide ». Décider quelles combinaisons de classes avant-après sont probables et lesquelles sont improbables dans une zone donnée requiert une certaine expertise, et les systèmes complexes de détection des changements sont souvent construits en combinant l’analyse des vecteurs de changement, la classification des changements et l’apport de ces experts.
