Learning Objectives
By the end of this section, you will be able to identify the following:
Describe how fascicles are arranged within a skeletal muscle
Patterns of Fascicle Organization
Skeletal muscle is enclosed in connective tissue scaffolding at three levels. Each muscle fiber (cell) is covered by endomysium and the entire muscle is covered by epimysium. When a group of muscle fibers is “bundled” as a unit within the whole muscle it is called a fascicle. Fascicles are covered by a layer of connective tissue called perimysium (see Figure 10.2.1). Fascicle arrangement is correlated to the force generated by a muscle and affects the muscle’s range of motion. Based on the patterns of fascicle arrangement, skeletal muscles can be classified in several ways. What follows are the most common fascicle arrangements.
Parallel muscles have fascicles that are arranged in the same direction as the long axis of the muscle (Figure 11.2.1). The majority of skeletal muscles in the body have this type of organization. Some parallel muscles are flat sheets that expand at the ends to make broad attachments such as the sartorius (see Figure 11.2.2). Other parallel muscles have a larger central region called a muscle belly tapering to tendons on each end. This arrangement is called fusiform such as the biceps brachii (see Figure 11.2.2).
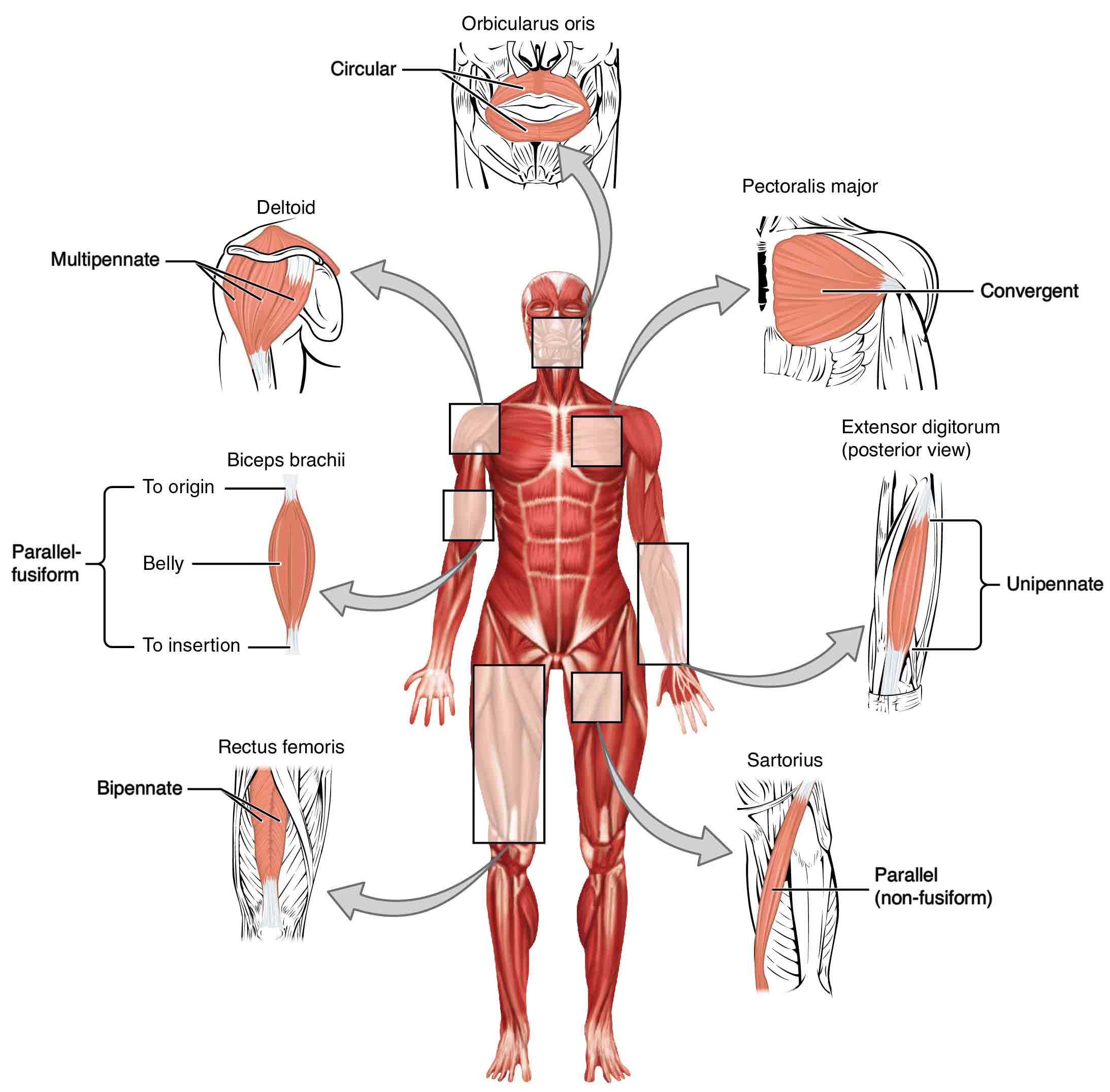
Circular muscles are also called sphincters (see Figure 11.2.1). When they relax, the sphincters’ concentrically arranged bundles of muscle fibers increase the size of the opening, and when they contract, the size of the opening shrinks to the point of closure. The orbicularis oris muscle is a circular muscle that goes around the mouth. When it contracts, the oral opening becomes smaller, as when puckering the lips for whistling. Another example is the orbicularis oculi, one of which surrounds each eye. Consider, for example, the names of the two orbicularis muscles (orbicularis oris and oribicularis oculi), where part of the first name of both muscles is the same. The first part of orbicularis, orb (orb = “circular”), is a reference to a round or circular structure; it may also make one think of orbit, such as the moon’s path around the earth. The word oris (oris = “oral”) refers to the oral cavity, or the mouth. The word oculi (ocular = “eye”) refers to the eye.
When a muscle has a widespread expansion over a sizable area and the fascicles come to a single, common attachment point, the muscle is called convergent. The attachment point for a convergent muscle could be a tendon, an aponeurosis (a flat, broad tendon), or a raphe (a very slender tendon). The large muscle on the chest, the pectoralis major, is an example of a convergent muscle because it converges on the intertubercular groove and greater tubercle of the humerus via a tendon (see image 11.3).
Pennate muscles (penna = “feathers”) blend into a tendon that runs through the central region of the muscle for its whole length, somewhat like the quill of a feather with the muscle fascicles arranged similar to the feathers. Due to this design, the muscle fibers in a pennate muscle can only pull at an angle, and as a result, contracting pennate muscles do not move their tendons very far. However, because a pennate muscle generally can hold more muscle fibers within it, it can produce relatively more tension for its size, compared to non-pennate muscles. There are three subtypes of pennate muscles.
In a unipennate muscle, the fascicles are located on one side of the tendon. The extensor digitorum of the forearm is an example of a unipennate muscle. A bipennate muscle such as the rectus femurs has fascicles on both sides of the tendon as in the arrangement of a single feather. Multipennate muscles have fascicles that insert on multiple tendons tapering towards a common tendon, like multiple feathers converging on a central point. A common example is the deltoid muscle of the shoulder, which covers the shoulder but has a single tendon that inserts on the deltoid tuberosity of the humerus.
The Lever System of Muscle and Bone Interactions
Skeletal muscles do not work by themselves. Muscles are arranged in pairs based on their functions. For muscles attached to the bones of the skeleton, the connection determines the force, speed, and range of movement. These characteristics depend on each other and can explain the general organization of the muscular and skeletal systems.
The skeleton and muscles act together to move the body. Have you ever used the back of a hammer to remove a nail from wood? The handle acts as a lever and the head of the hammer acts as a fulcrum, the fixed point that the force is applied to when you pull back or push down on the handle. The effort applied to this system is the pulling or pushing on the handle to remove the nail, which is the load, or “resistance” to the movement of the handle in the system. Our musculoskeletal system works in a similar manner, with bones being stiff levers and the articular endings of the bones—encased in synovial joints—acting as fulcrums. The load would be an object being lifted or any resistance to a movement (your head is a load when you are lifting it), and the effort, or applied force, comes from contracting skeletal muscle.
In the human body, most lever systems include the following components: the rigid lever arm (A) , which is a bone in the body, the fulcrum (F) (or axis of rotation), which is the joint, and the load (L), which is the center of mass or weight of the body part being moved, and the effort (E), which is the force exerted by the muscle at its point of attachment to the bone.
There are two factors that can influence the overall function of a lever system. The first is the order of arrangement of the fulcrum, load, and effort, which influences the function of the lever and whether it will be best at moving a heavy load a short distance or at moving a light load quickly over a long distance. The second factor is whether the effort arm or the load arm is the longest. The effort arm (EA) is the distance between the fulcrum (joint) and the effort (muscle insertion). The load arm (LA) is the distance between the fulcrum (joint) and the load (center of mass).
If the effort arm is longer than the load arm, the lever is referred to as a power lever that operates at a mechanical advantage. Levers with a mechanical advantage are well-suited for moving heavy loads over a short distance with less of an effort than would be required to move the object without the lever. One example of a power lever is a car jack that is used to change a tire. The car, which is a heavy load, is moved a small distance upward with each crank of the effort arm, which requires a minimal effort. Another example is a wheelbarrow.
If the load arm is longer than the effort arm, the lever is referred to as a speed lever that operates at a mechanical disadvantage. Levers with a mechanical disadvantage are well-suited for moving a smaller load quickly over a larger distance. Examples of a speed lever include a baseball bat hitting a ball (load) or a shovel moving dirt.
There are three main classes of levers, which differ according to how the load, fulcrum, and effort are arranged. The first-class lever is arranged so that the fulcrum (joint) is between the load and the effort. The first-class lever can be written as load, fulcrum, effort (LFE) or as effort, fulcrum load (EFL). A first-class lever can be a speed lever or a power lever, depending on whether the fulcrum in the middle is closer to the load or closer to the effort. Scissors and seesaws are examples of first-class levers. When the posterior neck muscles raise your head off or your chest, your head and neck are acting as a first-class lever. The muscles provide the effort, the joint between the head and the neck acts as the fulcrum, and the mass of the face serves as the load.
The second-class lever is arranged so that the load is between the fulcrum (joint) and the effort. The second-class lever can be written as fulcrum, load, effort (FLE) or as effort, load, fulcrum (ELF). A second-class lever is a power lever (with a mechanical advantage) because the effort arm is longer than the load arm. There are few examples of second-class levers in the human body. One example is if you raise your heels off the ground while seated in a chair with your feet in front of you and your knees at a 90-degree angle. This class of lever is efficient at moving large loads. With a second-class lever, a small effort is exerted over a relatively large distance, and it manages to move a large load over a small distance.
The third-class lever is arranged so that the effort is between the load and the fulcrum and can be written as load, effort, fulcrum (LEF) or as fulcrum, effort, load (FEL). The third-class lever is a speed lever that operates at a mechanical disadvantage. A shovel moving dirt and tweezers moving an object are examples of third-class lever systems. In the human body, flexing the forearm with the biceps brachii muscle is an example of a third-class lever. The third-class lever is the most common class of lever found in the human body. When considering this, one can conclude that the body is mostly made up of speed levers that are efficient at moving a smaller load (body parts) rapidly over a large distance with a large range of motion. This is what allows humans to move their limbs quickly to run and avoid immediate danger.
There is one other type of lever within the human body that uses a pulley system. One example of a muscle that operates using a pulley is the extraocular muscle of the eye called the superior oblique. This muscle extends along the inner wall of the eye orbit (socket) and travels through the trochlea, which is a loop composed of fibrocartilage that is attached to the frontal bone of the skull. The muscle tendon turns at a sharp angle and then attaches to the eyeball. This muscle uses the trochlea as a pulley to depress the eye and to turn it laterally. Another example is the long head of the biceps brachii muscle, which originates at the glenoid labrum and supraglenoid tubercle, forms an angle to track through the intertubercular sulculs (bicipital groove), and inserts into the radial tuberosity. The bicipital groove holds the muscle in place and serves as a pulley.
Chapter Review 11.1 and 11.2
Skeletal muscles each have an origin and an insertion. The end of the muscle that attaches to the bone being pulled is called the muscle’s insertion and the end of the muscle attached to a fixed, or stabilized, bone is called the origin. The muscle primarily responsible for a movement is called the prime mover, and muscles that assist in this action are called synergists. A synergist that makes the insertion site more stable is called a fixator. Meanwhile, a muscle with the opposite action of the prime mover is called an antagonist. Several factors contribute to the force generated by a skeletal muscle. One is the arrangement of the fascicles in the skeletal muscle. Fascicles can be parallel, circular, convergent, pennate, fusiform, or triangular. Each arrangement has its own range of motion and ability to do work.
Review Questions
Critical Thinking Questions
1. What effect does fascicle arrangement have on a muscle’s action?<
2. Movements of the body occur at joints. Describe how muscles are arranged around the joints of the body.
3. Explain how a synergist assists an agonist by being a fixator.
Glossary
- abduct
- move away from midline in the sagittal plane
- agonist
- (also, prime mover) muscle whose contraction is responsible for producing a particular motion
- antagonist
- muscle that opposes the action of an agonist
- belly
- bulky central body of a muscle
- bipennate
- pennate muscle that has fascicles that are located on both sides of the tendon
- circular
- (also, sphincter) fascicles that are concentrically arranged around an opening
- convergent
- fascicles that extend over a broad area and converge on a common attachment site
- effort
- the point of force application, like a muscle attachment
- effort arm
- the distance between the fulcrum (joint) and the effort (muscle insertion)
- fascicle
- muscle fibers bundled by perimysium into a unit
- fixator
- synergist that assists an agonist by preventing or reducing movement at another joint, thereby stabilizing the origin of the agonist
- flexion
- movement that decreases the angle of a joint
- fulcrum
- an axis of rotation, like a joint
- fusiform
- muscle that has fascicles that are spindle-shaped to create large bellies
- insertion
- end of a skeletal muscle that is attached to the structure (usually a bone) that is moved when the muscle contracts
- lever arm
- a rigid bar, like a bone
- load
- the resistance to the force, due to gravity or the mass of an object
-
-
- load arm
- the distance between the fulcrum (joint) and the load (center of mass)
-
-
- multipennate
- pennate muscle that has a tendon branching within it
- origin
- end of a skeletal muscle that is attached to another structure (usually a bone) in a fixed position
- parallel
- fascicles that extend in the same direction as the long axis of the muscle
- pennate
- fascicles that are arranged differently based on their angles to the tendon
- power lever
- the effort arm is longer than the load arm which allows a lever system to move a large load across a small distance
- prime mover
- (also, agonist) principle muscle involved in an action
- speed lever
- the load arm is longer than the effort arm
- synergist
- muscle whose contraction helps a prime mover in an action
- unipennate
- pennate muscle that has fascicles located on one side of the tendon
Solutions
Answers for Critical Thinking Questions
- Fascicle arrangements determine what type of movement a muscle can make. For instance, circular muscles act as sphincters, closing orifices.
- Muscles work in pairs to facilitate movement of the bones around the joints. Agonists are the prime movers while antagonists oppose or resist the movements of the agonists. Synergists assist the agonists, and fixators stabilize a muscle’s origin.
- Agonists are the prime movers while antagonists oppose or resist the movements of the agonists. Synergists assist the agonists, and fixators stabilize a muscle’s origin.
This work, Anatomy & Physiology, is adapted from Anatomy & Physiology by OpenStax, licensed under CC BY. This edition, with revised content and artwork, is licensed under CC BY-SA except where otherwise noted.
Images, from Anatomy & Physiology by OpenStax, are licensed under CC BY except where otherwise noted.
Access the original for free at https://openstax.org/books/anatomy-and-physiology/pages/1-introduction.
