9.1. Concepts: Torque; Rotational Equilibrium
Introduction
When a force acts on an object at a certain distance from a pivot or rotation point (or rotation axis), it is said that the force creates a torque. The torque will cause the object to either start rotating or accelerate/decelerate its original rotational motion.
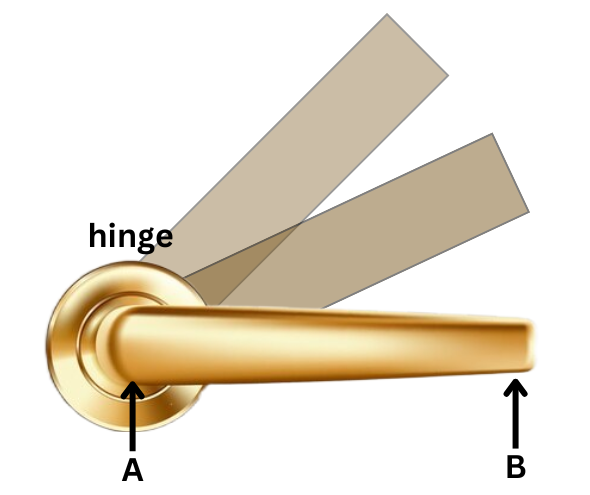
For instance, a force that we apply to the doorknob to open the door will create a torque that will determine the door to rotate with respect to its hinges, thus, to open (Figure 9.1 a).
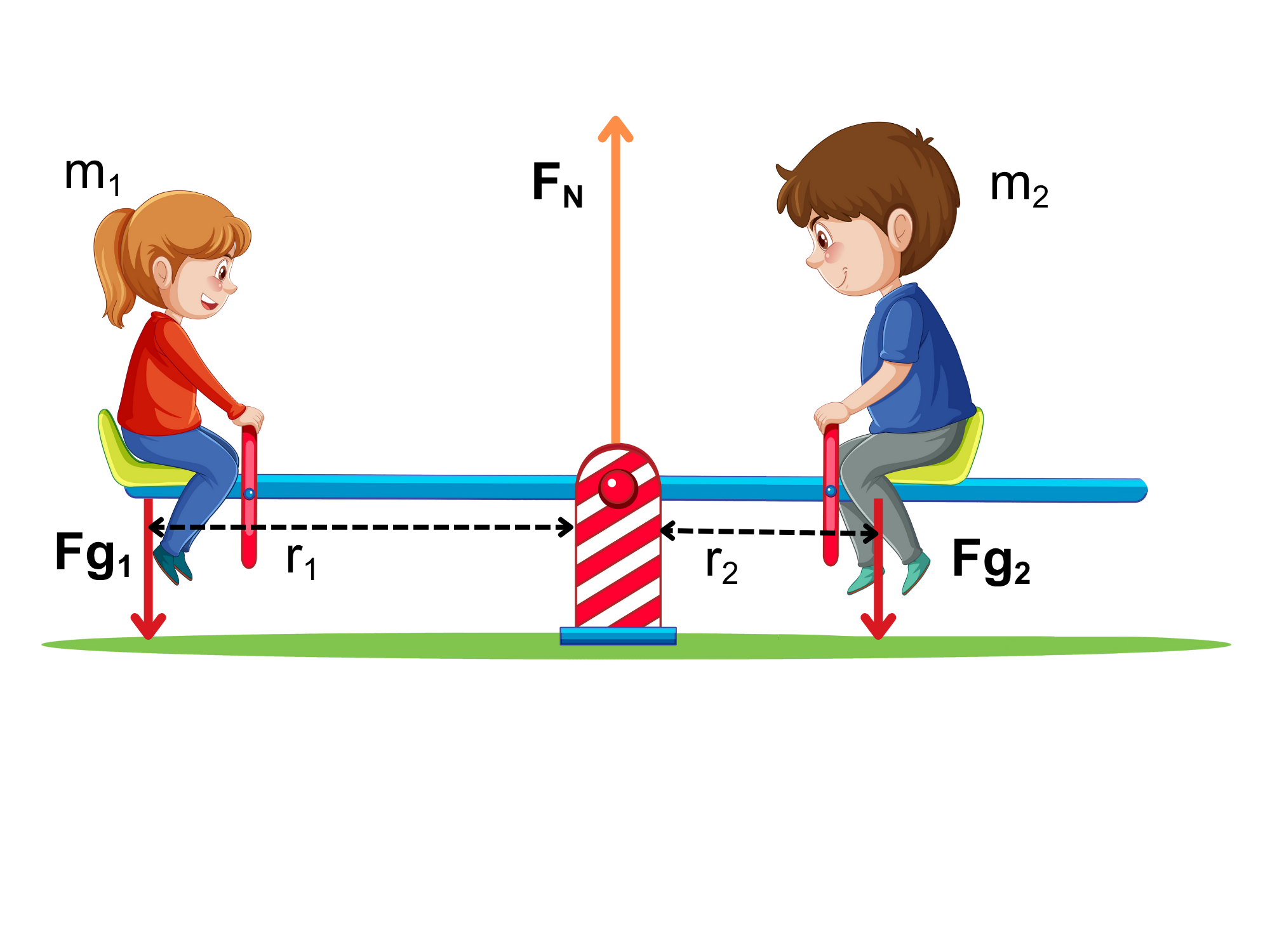
The weight of a child sitting on a seesaw will create a torque forcing the seesaw to rotate with respect to the pivot point. If a second child finds a certain position on the other side of the pivot point, rotational equilibrium can be achieved (Figure 9.1 b).
Concepts
Consider a wrench used to tighten or loosen a bolt.
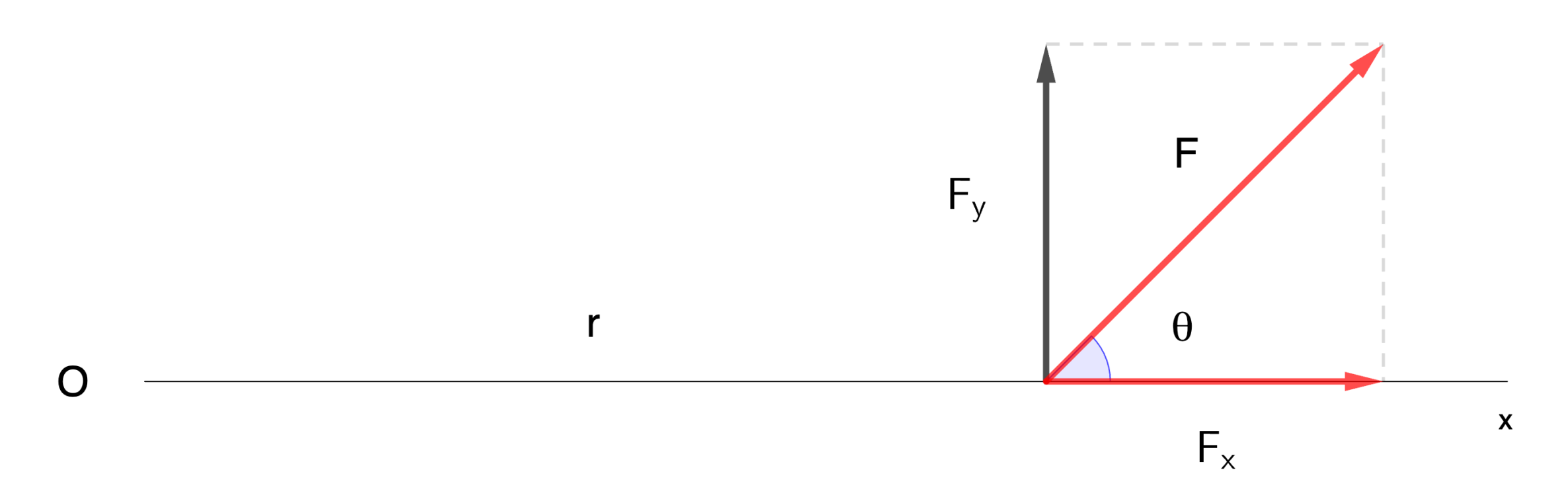
The force producing the torque is applied at a distance r from the point of rotation (the bolt). This distance, r, is called the arm of the force or the position vector; this is also a vector.
The components of the applied forces are:
[latex]F_x = F \times \cos\theta[/latex] (1)
[latex]F_y = F \times \sin\theta[/latex] (2)
We notice that [latex]F_x[/latex] will not produce any rotation since it is parallel to the arm of the force; hence the torque will be created by the y component of the force, [latex]F_y[/latex].
Torque is a vector quantity, so it is described by a magnitude and a direction.
The magnitude of the torque can be calculated as:
[latex]{\tau} = F \times r \times \sin\theta \text{ (3)}[/latex]
In Formula 3:
[latex]F[/latex] - represents the force applied to the object in [latex]\text{[N]}[/latex]
[latex]r[/latex] - represents the arm of the force in [latex]\text{[m]}[/latex]
[latex]\theta[/latex] - represents the angle between the force and the arm of the force
The unit for torque is [latex]\text{Nm}[/latex].
Torque depends on three factors (as it can be seen from formula 3):
- The magnitude of the force (the bigger the force, the bigger the torque).
- The arm of the force (the bigger the arm, the bigger the torque).
- The angle between the force and the arm of the vector. The closer the angle gets to 90 degrees, the bigger the torque. When the angle is exactly 90 degrees, the torque becomes:
[latex]\tau = F \times r \times \sin 90^\circ = F \times r[/latex]
In this situation the torque is at its maximum value for a given force and arm of the force
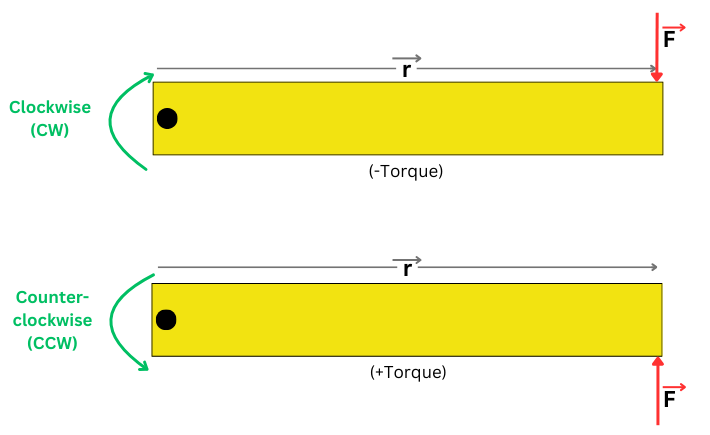
The direction of torque, by convention is:
- If the force tends to rotate the object clockwise (CW), the torque is considered negative.
- If the force tends to rotate the object counterclockwise (CCW), the torque is considered positive.
Net torque
[latex]\overrightarrow{\tau}_{\text{net}} = \sum \overrightarrow{\tau}[/latex] (4)
Image Attributions
- Figure 9.1.a adapted from:
- A door hinge by Upklyak courtesy of Freepik
- Figure 9.1.b adapted from:
- A Boy and Girl on the seesaw by brgfx courtesy of Freepik
- Figure 9.2 Created with: Geogebra and licensed under CC-BY-NC-SA 3.0.
