9.3.1 Plan d’expériences : Optimisation et méthodologie des surfaces de réponse
9.3.1. Optimisation
MSR pour une seule variable
Examinons d’abord l’effet d’un seul facteur  sur la réponse,
sur la réponse,  . Cet exemple servira à illustrer le principe général du processus de surface de réponse.
. Cet exemple servira à illustrer le principe général du processus de surface de réponse.
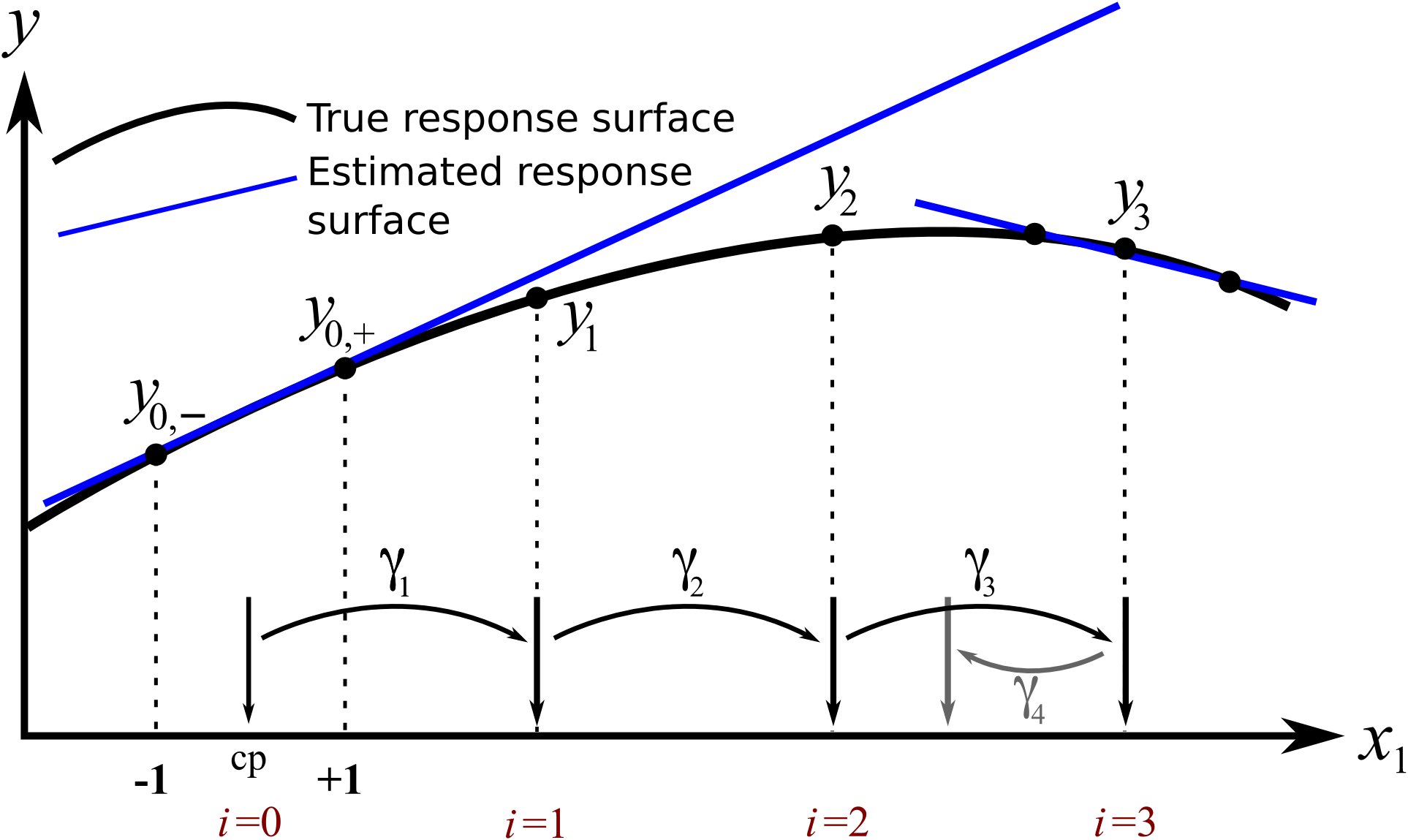
Le point  sert de point de référence initial (pc = point de centrage). Puis, on exécute une expérience à deux niveaux, au-dessous (à - 1) et au-dessus (à 1) de ce point de référence, et on obtient des valeurs de réponse correspondantes de
sert de point de référence initial (pc = point de centrage). Puis, on exécute une expérience à deux niveaux, au-dessous (à - 1) et au-dessus (à 1) de ce point de référence, et on obtient des valeurs de réponse correspondantes de  et
et  . À partir de là, on peut estimer la droite de régression et la suivre dans la direction croissante . Notez que l’inclinaison de la pente d’une droite tangente correspond à la trajectoire de pente maximale. On effectue un pas de
. À partir de là, on peut estimer la droite de régression et la suivre dans la direction croissante . Notez que l’inclinaison de la pente d’une droite tangente correspond à la trajectoire de pente maximale. On effectue un pas de  unités le long de , puis on mesure la réponse,
unités le long de , puis on mesure la réponse,  . Puisque la variable de la réponse a augmenté, on poursuit dans cette direction.
. Puisque la variable de la réponse a augmenté, on poursuit dans cette direction.
On effectue un nouveau pas, cette fois-ci de unités dans la direction où est croissant. On mesure la réponse,
unités dans la direction où est croissant. On mesure la réponse,  , qui est encore croissante. Ce résultat nous encourage à effectuer un nouveau pas de
, qui est encore croissante. Ce résultat nous encourage à effectuer un nouveau pas de  . Les pas
. Les pas  doivent être suffisamment grands pour causer une variation de la réponse lors d’un nombre raisonnable d’expériences, sans toutefois être si grands qu’ils nous feraient passer à côté d’un optimum.
doivent être suffisamment grands pour causer une variation de la réponse lors d’un nombre raisonnable d’expériences, sans toutefois être si grands qu’ils nous feraient passer à côté d’un optimum.
Le nouveau point,  , a environ la même valeur que , ce qui indique qu’on a atteint un plateau. À ce stade, on peut se lancer dans une démarche exploratoire et réajuster la tangente (qui est maintenant de pente inverse). On peut aussi utiliser les points de données accumulés pour faire une régression non linéaire. Dans les deux cas, on peut alors estimer un nouveau pas de progression de
, a environ la même valeur que , ce qui indique qu’on a atteint un plateau. À ce stade, on peut se lancer dans une démarche exploratoire et réajuster la tangente (qui est maintenant de pente inverse). On peut aussi utiliser les points de données accumulés pour faire une régression non linéaire. Dans les deux cas, on peut alors estimer un nouveau pas de progression de  pour se rapprocher de l’optimum.
pour se rapprocher de l’optimum.
Cette approche convient lorsque la réponse ne dépend que d’un seul facteur. Cependant, dans la plupart des systèmes, la réponse est influencée par plusieurs facteurs, ce qui nous oblige à adapter cette méthode pour trouver les optimums du système.
9.3.2. Optimisation d’un système à deux variables
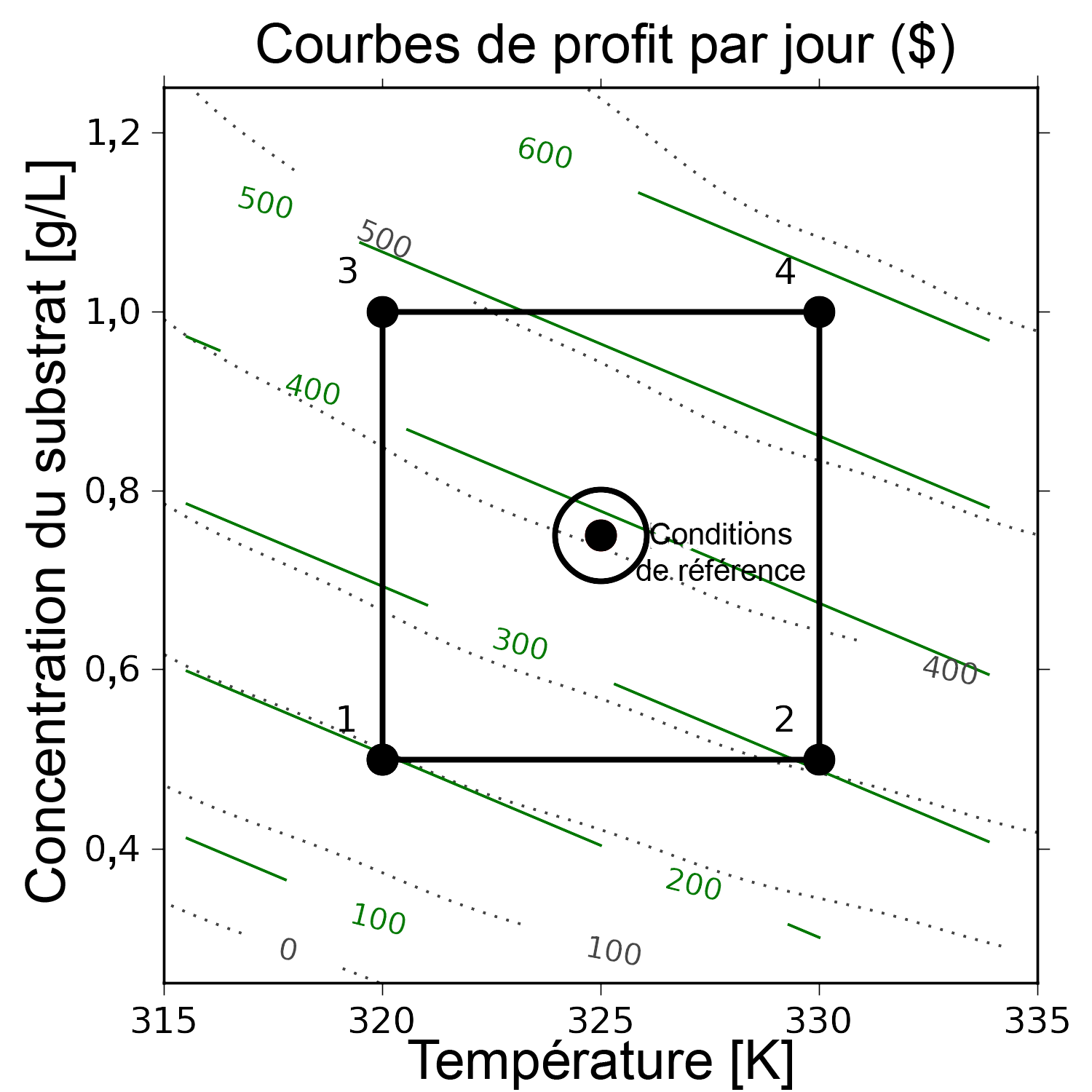
Supposons qu’on cherche à optimiser un bioréacteur dont le rendement est affecté par deux facteurs, la température T et la concentration en substrat S. Or, le résultat qui nous intéresse dans ce contexte, c’est le profit total, qui prend en compte les coûts énergétiques, les coûts des matières premières et autres facteurs pertinents. La figure 9.3.2.1 illustre en gris clair des courbes (hypothétiques) de profit. En pratique, ces courbes sont souvent inconnues. Le système fonctionne actuellement dans les conditions suivantes (conditions de référence) :
- T = 325 K
- S = 0,75 g/L
- Profit = 407 $ par jour
On crée une analyse factorielle complète à partir de ces conditions en choisissant  K, et
K, et  g/L, sachant que ces pas sont suffisamment grands pour révéler une différence dans la valeur de la réponse (voir le tableau 9.3.2.1), sans toutefois être si grands qu’ils exploreraient un tout autre régime du bioréacteur.
g/L, sachant que ces pas sont suffisamment grands pour révéler une différence dans la valeur de la réponse (voir le tableau 9.3.2.1), sans toutefois être si grands qu’ils exploreraient un tout autre régime du bioréacteur.
| Expérience | T (réelle) | S (réelle) | T (codée) | S (codée) | Profit |
|---|---|---|---|---|---|
| Conditions de référence | 325 K | 0,75 g/L | 0 | 0 | 407 |
| 1 | 320 K | 0,50 g/L | – | – | 193 |
| 2 | 330 K | 0,50 g/L | + | – | 310 |
| 3 | 320 K | 1,0 g/L | – | + | 468 |
| 4 | 330 K | 1,0 g/L | + | + | 571 |
Il apparaît clairement qu’on peut maximiser les profits en opérant à des températures plus élevées et en utilisant de plus fortes concentrations de substrat. Néanmoins, la seule manière de mesurer ce taux d’augmentation est d’établir un modèle linéaire du système à partir des données factorielles :
où [latex][/latex]x_T = \dfrac{x_{T,\text{réelle}} - \text{centre}_T}{\Delta_T/2}" title="\begin{split}\hat{y} &= b_0 + b_T x_T + b_S x_S + b_{TS} x_T x_S \\ \hat{y} &= 389,8 + 55 x_T + 134 x_S - 3,50 x_T x_S\end{split}
où [latex][/latex]x_T = \dfrac{x_{T,\text{réelle}} - \text{centre}_T}{\Delta_T/2}" class="latex mathjax"> 
et  .
.
Le modèle démontre que l’on peut s’attendre à une hausse de profit de 55 $ par jour pour une augmentation d’une unité de T. En unités réelles, il faudrait augmenter la température de  pour atteindre cet objectif. Ce facteur d’échelle provient du codage que nous avons utilisé :
pour atteindre cet objectif. Ce facteur d’échelle provient du codage que nous avons utilisé :
\Delta x_T &= \displaystyle \frac{\Delta x_{T,\text{réelle}}}{\Delta_T / 2}\end{split}\]
Au même titre, on peut augmenter \(S\) par  pour obtenir une hausse de profit de 134 $ par jour.
pour obtenir une hausse de profit de 134 $ par jour.
Le terme d’interaction est faible, ce qui suggère que la surface de réponse est plutôt linéaire dans cette région. La figure 9.3.2.1 illustre les contours du modèle (lignes droites vertes). Observez que les contours du modèle représentent une bonne approximation des contours réels (en pointillé, gris clair), lesquels restent inconnus en pratique.
Pour accroître le profit de manière optimale, on se déplace le long de la surface du modèle estimé, dans la direction de la pente maximale. Pour obtenir cette direction, il suffit de prendre les dérivées partielles de la fonction du modèle en ignorant le terme d’interaction (qui est négligeable).
Cela signifie que pour chaque déplacement  unités codées selon
unités codées selon  , il faut égaglement faire un déplacement selon
, il faut égaglement faire un déplacement selon  de
de  unités codées. Mathématiquement :
unités codées. Mathématiquement :
Le plus simple, c’est de choisir le pas de l’une des variables, puis d’ajuster l’autre en conséquence.
Ainsi, on choisit d’augmenter de  unité codée, ce qui signifie :
unité codée, ce qui signifie :
\Delta x_{T,\text{réelle}} &= 5 \,\text{K} \\
\Delta x_S &= \frac{b_S}{b_T} \Delta x_T = \frac{134}{55} \Delta x_T \\
\text{mais comme}\qquad\qquad \Delta x_S &= \frac{x_{S,\text{réelle}}}{\Delta_S / 2} \\
\Delta x_{S,\text{réelle}} &= \frac{134}{55} \times 1 \times \Delta_S / 2\,\, \text{en comparant les deux lignes précédentes} \\
\Delta x_{S,\text{réelle}} &= \frac{134}{55} \times 1 \times 0,5 / 2 = \bf{0,61}\,\,\text{g/L}\\\end{split}\]


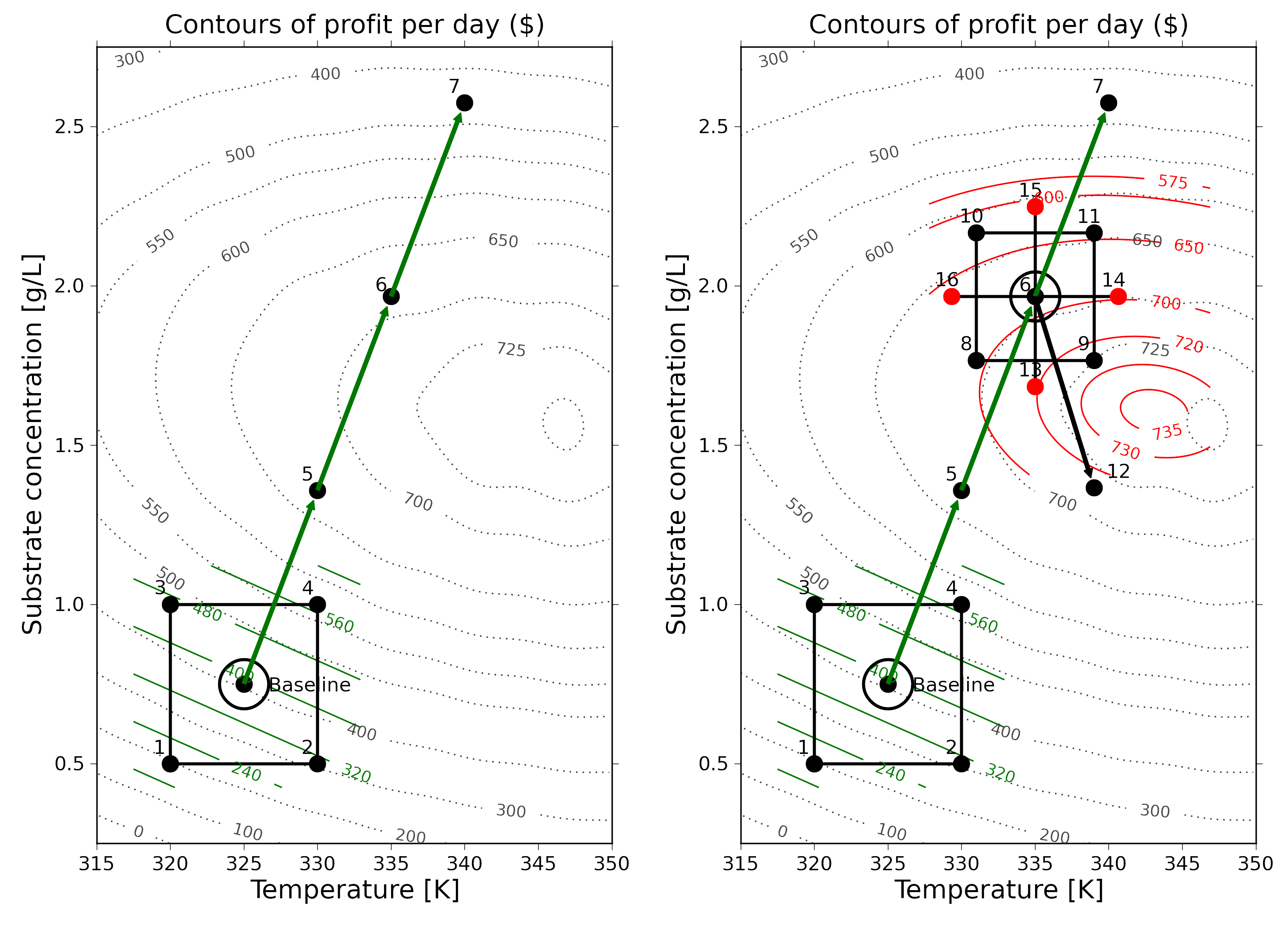
On mène donc l’expérience suivante selon ces conditions, et le profit quotidien vaut y_5 = 669 $ y_5 = 669 $. Il s’agit d’une amélioration substantielle par rapport aux conditions de référence.
On décide d’effectuer un autre déplacement, dans la même direction de pente maximale, c’est-à-dire le long du vecteur qui pointe dans la direction  . On augmente la température de 5K (mais le pas aurait pu être plus grand ou plus petit), et on obtient les conditions suivantes pour l’expérience 6 :
. On augmente la température de 5K (mais le pas aurait pu être plus grand ou plus petit), et on obtient les conditions suivantes pour l’expérience 6 :


Cette fois, le profit est de  . La croissance se poursuit, mais dans une proportion moindre. Elle commence peut-être à se stabiliser. On décide toutefois d’encore monter la température de 5 K et d’augmenter la concentration de substrat en conséquence. On obtient ainsi les conditions suivantes pour l’expérience 7 :
. La croissance se poursuit, mais dans une proportion moindre. Elle commence peut-être à se stabiliser. On décide toutefois d’encore monter la température de 5 K et d’augmenter la concentration de substrat en conséquence. On obtient ainsi les conditions suivantes pour l’expérience 7 :


Cette fois, le profit est de  . Nous sommes allés trop loin, puisque les profits ont chuté. Il faut donc revenir au meilleur point précédent, parce que la surface a manifestement changé, et réajuster le modèle avec une nouvelle analyse factorielle dans ce voisinage :
. Nous sommes allés trop loin, puisque les profits ont chuté. Il faut donc revenir au meilleur point précédent, parce que la surface a manifestement changé, et réajuster le modèle avec une nouvelle analyse factorielle dans ce voisinage :
| Expérience | T (réelle) | S (réelle) | T (codée) | S (codée) | Profit |
|---|---|---|---|---|---|
| 6 | 335 K | 1,97 g/L | 0 | 0 | 688 $ |
| 8 | 331 K | 1,77 g/L | - | - | 694 $ |
| 9 | 339 K | 1,77 g/L | + | - | 725 $ |
| 10 | 331 K | 2,17 g/L | - | + | 620 $ |
| 11 | 339 K | 2,17 g/L | + | + | 642 $ |
Pour se déplacer plus lentement le long de la surface, on opte pour de plus petites étendues dans la factorielle : K") et
et g/L") .
.
Un modèle des moindres carrés basé sur les quatre points factoriels (les expériences 8, 9, 10 et 11, exécutées dans un ordre aléatoire), suggère que la tendance la plus favorable serait d’augmenter la température tout en réduisant la concentration de substrat.
\hat{y} &= 673,8 + 13,25 x_T - 39,25 x_S - 2,25 x_T x_S\end{split}\]
Comme auparavant, on avance dans la direction la pente maximale en faisant un pas de  unités le long de la direction et de
unités le long de la direction et de  unités le long de la direction . On choisi à nouveau unité. (Rappelons qu’on pourrait opter pour un pas plus petit ou plus grand, si nécessaire.) Par conséquent :
unités le long de la direction . On choisi à nouveau unité. (Rappelons qu’on pourrait opter pour un pas plus petit ou plus grand, si nécessaire.) Par conséquent :
\Delta x_S &= \frac{-39}{13} \times 1\\
\Delta x_{S, \text{réelle}} &= \frac{-39}{13} \times 1 \times 0,4 /2 = -0,6\,\text{g/L}\\
\Delta x_{T, \text{réelle}} &= 4\,\text{K}\\\end{split}\]


{kind=link}
On détermine que le profit s’élève alors à 716 $. Or, l’analyse factorielle précédente présentait une valeur de profit de 725 $ à l’un des coins. Il se pourrait qu’il y ait du bruit dans le systèmes. En effet, la différence entre 716 $ et 725 $ ne représente pas un montant très élevé; en revanche, on observe une différence de profit relativement importante entre les autres points de l’analyse factorielle.
Quelques considérations à prendre en compte lorsqu’on s’approche d’un optimum :
- La variable de réponse atteindra un plateau (rappelez-vous qu’à un optimum, la première dérivée première vaut zéro).
- Si la variable de réponse reste à peu près constante pendant deux sauts consécutifs, vous avez peut-être dépassé l’optimum.
- La variable de réponse peut diminuer, parfois très rapidement, si vous dépassez l’optimum.
- On peut aussi déduire que la surface est courbe si les termes d’interaction sont du même ordre de grandeur (ou plus grands) que les termes d’effets principaux.
En d’autres termes, les optimums présentent une certaine courbure. Ainsi, un modèle qui ne comporte que des termes linéaires ne pourra pas vous indiquer la direction de pente maximale le long de la surface de réponse réelle. Il faut ajouter des termes qui tiennent compte de cette courbure.
9.3.3. Vérification de la courbure
Lorsque le point de centrage mesuré diffère sensiblement du point de centrage prédit par le modèle linéaire, c’est que la surface de réponse est courbe, ce qu’il faut représenter par l’ajout de termes polynomiaux.
Le point de centrage de l’analyse factorielle peut être prédit à partir de  = (0,0)") – c’est simplement le terme d’intersection. Dans la dernière analyse factorielle, le point de centrage prédit correspondait à
– c’est simplement le terme d’intersection. Dans la dernière analyse factorielle, le point de centrage prédit correspondait à  . Or, le point de centrage réel de l’expérience 6 affichait un profit de 688 $. Cette différence de 18 $ s’avère substantielle, surtout si on la compare aux coefficients des effets principaux.
. Or, le point de centrage réel de l’expérience 6 affichait un profit de 688 $. Cette différence de 18 $ s’avère substantielle, surtout si on la compare aux coefficients des effets principaux.
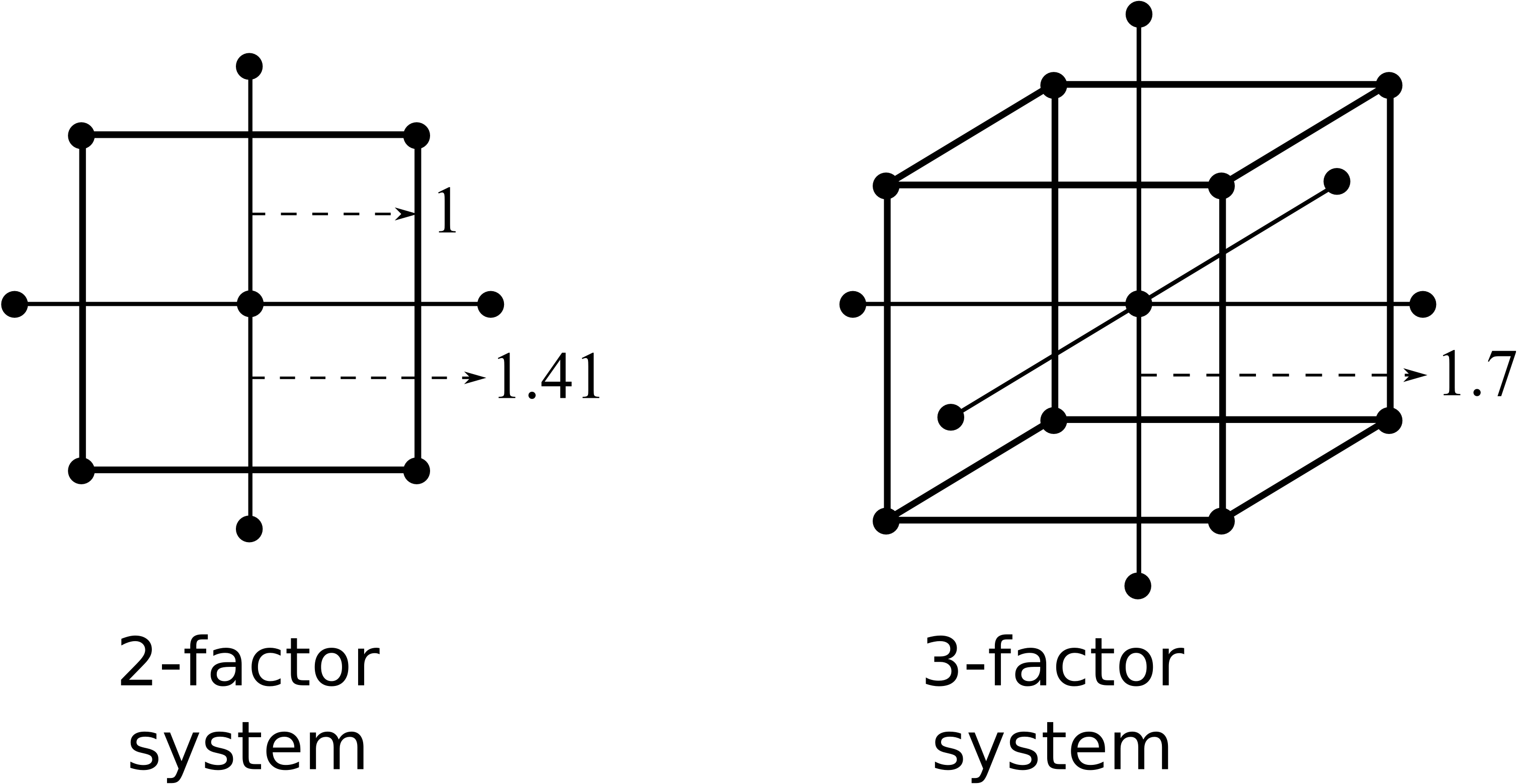
9.3.4. Plans composites centrés
L’analyse détaillée des plans composites centrés ne sera pas abordée dans le présent manuel. Toutefois, cette partie montre quelques exemples à deux et trois variables, à partir d’une factorielle orthogonale existante à laquelle on ajoute des points axiaux. Ces points pourront être aisément ajoutés ultérieurement pour tenir compte de la non-linéarité.
Les points axiaux sont placés à  unité codée du centre pour un système à deux facteurs, et à
unité codée du centre pour un système à deux facteurs, et à  unité codée pour un système à trois facteurs.
unité codée pour un système à trois facteurs.
Un plan composite central a été ajouté à l’analyse factorielle dans l’exemple ci-dessus, puis les expériences ont été exécutées, de manière aléatoire, aux quatre points axiaux.
Les quatre valeurs de réponse étaient  ,
,  ,
,  et
et  . Cela nous permet d’estimer un modèle contenant des termes quadratiques :
. Cela nous permet d’estimer un modèle contenant des termes quadratiques :  . Les paramètres de ce modèle s’obtiennent selon la procédure habituelle, en utilisant un modèle des moindres carrés :
. Les paramètres de ce modèle s’obtiennent selon la procédure habituelle, en utilisant un modèle des moindres carrés :

Remarquez que les termes linéaires sont identiques à ce qu’on avait auparavant! Les effets quadratiques se révèlent assez significatifs par rapport aux autres effets; en effet, c’est ce qui a empêché le modèle linéaire de prédire le résultat de l’expérience 12.
La dernière étape de la méthodologie des surfaces de réponse consiste à tracer le contour de ce modèle et à prédire où exécuter les prochaines expériences. Comme le démontrent les lignes continues de contour dans l’illustration, il faudrait exécuter les prochaines expériences approximativement à T = 343K et à S = 1,60 g/L, où le profit escompté avoisine 736 $. (Ces valeurs peuvent être obtenues de manière approximative par un examen visuel, ou de manière analytique.) Le véritable optimum du processus ne se situe pas exactement là, mais il s’en rapproche beaucoup.
Cet exemple a démontré toute la puissance de la méthode des surfaces de réponse. Un nombre minimal d’expériences a rapidement convergé vers le véritable optimum (qui était inconnu) du processus. Pour y parvenir, nous avons établi une succession de modèles des moindres carrés permettant d’obtenir une approximation de la surface sous-jacente. Ces modèles des moindres carrés se construisent avec les outils des analyse factorielles fractionnaires et complètes, ainsi qu’avec les fondements de l’optimisation. Ainsi, sommes en mesure de gravir la pente maximale.