Chapitre 3 : Phonétique
3.7 Articulateurs en langue des signes
Unités phonétiques des langues des signes
Comme il est mentionné dans la section 3.1, la phonétique articulatoire s’intéresse à la manière dont le corps produit un signal linguistique, quelle que soit la modalité. Normalement, nous ne voulons pas décrire l’articulation globale d’un mot entier dans la langue parlée, c’est pourquoi nous le décomposons en phones pour faciliter la discussion. Quelle est donc l’unité comparable pour les langues des signes?
Dans les langues des signes, l’unité significative indépendante de base, l’équivalent d’un mot de la langue parlée, est généralement un signe individuel. Mais les signes ne semblent pas avoir d’équivalent direct des phones. Les phones peuvent généralement être parlés seuls, séparément des autres phones. Par exemple, nous pouvons prendre n’importe quel phone individuel du mot anglais [bɛd] « bed » (lit) et prononcer chacun d’entre eux séparément. Cela peut être gênant, surtout pour les plosives comme [b] et [d], mais ce n’est pas impossible. L’indépendance des phones par rapport aux mots et leur capacité à être recombinés de différentes manières est une propriété essentielle des langues parlées.
Mais le signe BED (lit) correspondant en langue ASL ne peut pas être décomposé de la même manière. Par exemple, peu importe ce que nous essayons de faire avec notre main, elle existe toujours sous une certaine forme et à un certain endroit. Nous ne pouvons pas simplement faire disparaître les doigts ou placer la main dans une mystérieuse dimension nulle. Ainsi, si nous voulons donner à la main une forme particulière, nous devons nécessairement le faire quelque part, et de même, si nous voulons placer la main à un endroit donné, nous devons nécessairement configurer les doigts d’une manière ou d’une autre.
C’est également ainsi que fonctionnent les propriétés articulatoires des phones. On ne peut pas faire une articulation avec la pointe de la langue et la crête alvéolaire sans décider aussi de la distance qui les sépare, et on ne peut pas employer un mode d’articulation sans choisir un articulateur actif et un articulateur passif, et donc sans choisir un lieu d’articulation. En d’autres termes, les propriétés des phones telles que le lieu et la manière sont interdépendantes, de la même manière que la forme de la main et son emplacement sont interdépendants. Mais ce n’est pas ainsi que les phones se comportent, puisqu’ils ont une existence indépendante et peuvent être articulés séparément des autres phones.
Ainsi, les unités d’articulation de la langue des signes qui nous intéressent sont les signes (mots entiers indépendants) et les propriétés articulatoires individuelles d’un signe (comment les différents articulateurs sont formés et déplacés). Il ne semble pas y avoir d’unité intermédiaire en langue des signes qui corresponde aux phones de la langue parlée (cependant, consultez la section 3.10 pour une discussion sur les syllabes en tant que type d’unité organisationnelle intermédiaire que les langues parlées et des signes semblent avoir).
Notation des signes : Les unités linguistiques des langues parlées sont souvent indiquées en italique, avec la glose (sens) entre guillemets, tandis que les signes des langues des signes sont souvent indiqués en majuscules ou en petites majuscules. On écrira donc bed pour désigner le mot anglais, ;lit pour désigner le mot français équivalent, et BED ou BED pour désigner le signe équivalent en ASL.
Il existe des différences dans la manière d’écrire sur les signes dans des langues qui ne sont pas liées à la langue écrite utilisée pour parler de ces signes. Puisque le contenu de ce manuel est présenté en anglais écrit, nous utilisons l’anglais pour écrire les signes en ASL, mais que faire pour la langue des signes québécoise (LSQ), qui n’a aucun lien avec l’anglais?
Une option consiste à écrire le signe en anglais, ce qui nous permet d’écrire sur le signe BED de l’ASL et le signe LIT de la LSQ. Une autre option consiste à écrire le signe en utilisant la langue écrite ambiante la plus proche de la langue des signes, et d’ajouter une glose en anglais. Dans ce cas, la LSQ a un lien avec le français, nous pourrions donc écrire sur le signe BED de l’ASL, mais sur le signe LIT de la LSQ, en utilisant le mot français lit. Les deux options présentent des avantages et des inconvénients; vous les verrez toutes deux utilisées dans la littérature linguistique, bien que la première option soit peut-être la plus courante.
Pour les langues des signes, nous disposons de deux catégories principales d’articulateurs dont il faut analyser les propriétés. Les articulateurs manuels sont les bras, les mains et les doigts, qui sont les principaux articulateurs utilisés pour la gesticulation (et la source de la moitié articulatoire du nom de la modalité de la langue des signes, manuel-visuel). Cependant, la majeure partie du reste du corps est également utilisée dans les langues des signes, en particulier le torse, la tête et les traits du visage. Tous ces autres articulateurs sont appelés les ;articulateurs non manuels ou parfois tout simplement les ;non manuels.
Articulateurs manuels
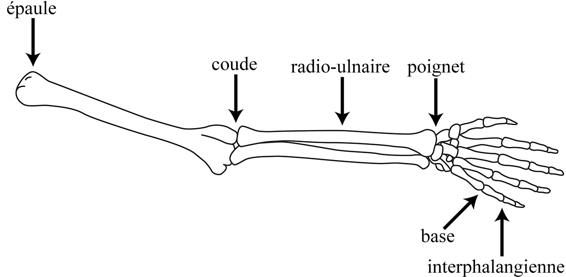
Les articulateurs manuels se déplacent au moyen d’articulations, qui sont des endroits du corps où deux os ou plus se rejoignent pour permettre un certain type de mouvement. Les articulateurs manuels comportent six types d’articulation : l’épaule, le coude, l’articulation radio-ulnaire (ou simplement radio-ulnaire), le poignet, les articulations des doigts à la base des phalanges et les articulations interphalangiennes (ou simplement interphalangiennes), disposées comme le montre la figure 3.20.
Articulation des épaules
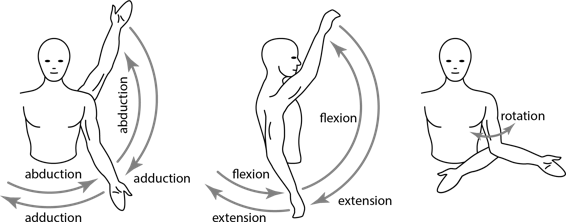
L’épaule tourne à l’intérieur de l’omoplate, ce qui permet un large éventail de mouvements pour le bras, comme le montre la figure 3.21. Le mouvement que nous utilisons pour les sautillements sur place (plus couramment, des « jumping jacks »), avec les bras faisant des arcs vers le haut et vers le bas à gauche et à droite du torse, est appelé abduction (pour la direction vers le haut/l’extérieur) et adduction (pour la direction vers le bas/l’intérieur). Le mouvement pour lever et abaisser le bras devant nous est l’extension (pour lever) et la flexion (pour abaisser). Enfin, l’épaule peut maintenir la partie supérieure du bras dans une position fixe tout en modifiant la position de l’avant-bras par une ;rotation. Le mouvement au niveau de l’articulation de l’épaule peut être une combinaison de ces trois types de mouvement.
Articulation du coude
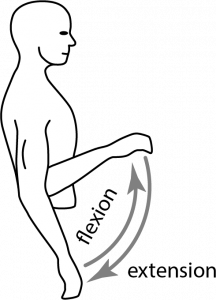
Le coude est l’articulation entre la partie supérieure du bras et l’avant-bras. Son amplitude de mouvement est plus restreinte que celle de l’épaule, puisqu’il ne permet que la flexion (rapprochement de l’avant-bras vers la partie supérieure du bras) et l’extension (flexion dans l’autre sens), comme le montre la figure 3.22. D’autres types de mouvements au niveau du coude sont fortement limités, voire impossibles. Veuillez noter que, contrairement à l’épaule, le coude ne peut pas s’étendre vers l’arrière à partir d’une position suspendue, mais seulement à partir d’une position fléchie.
Articulation radio-ulnaire
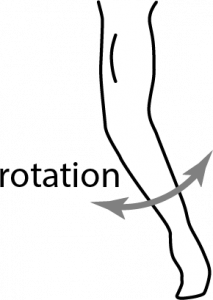
L’avant-bras contient deux grands os, le radius (qui se trouve du côté du pouce) et le cubitus (du côté de l’auriculaire). Le radius et le cubitus se rejoignent à trois endroits différents pour trois types de mouvements différents : au coude, au poignet et au milieu de l’avant-bras. Ces trois points de mouvement sont considérés comme des articulations radio-ulnaires sur le plan biologique et portent des noms distincts (l’articulation radio-ulnaire supérieure au coude, l’articulation radio-ulnaire inférieure au poignet et l’articulation radio-ulnaire médiale à l’intérieur de l’avant-bras), mais dans le contexte de la phonétique de la langue des signes, nous n’avons normalement besoin de parler que de l’une d’entre elles, car leurs mouvements sont liés. Par convention, l’articulation dont nous parlons est l’articulation radio-ulnaire médiale. Au niveau de cette articulation radio-ulnaire, le radius et le cubitus pivotent l’un autour de l’autre, ce qui permet à l’avant-bras de tourner, comme le montre la figure 3.23.
Articulation du poignet
Le poignet est l’articulation entre l’avant-bras et la main, et il est presque aussi mobile que l’épaule, comme le montre la figure 3.24, permettant l’abduction (latéralement vers le pouce), l’adduction (latéralement vers l’auriculaire), l’extension (flexion vers l’arrière) et la flexion (flexion vers l’avant), mais pas la rotation. Il est à noter que ce que nous pourrions considérer au départ comme une rotation au niveau du poignet est en fait dû à l’articulation radio-ulnaire. Comme l’épaule, le poignet peut généralement s’étendre vers l’arrière.
Articulation des doigts à la base des phalanges
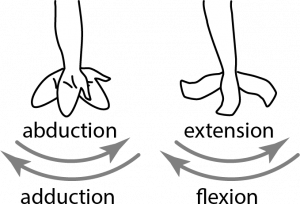
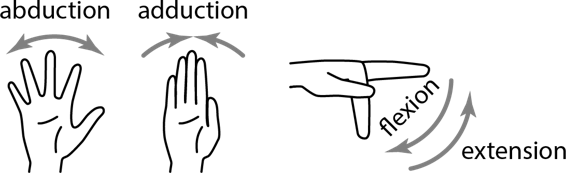
Les articulations des doigts à la base des phalanges sont les articulations où les doigts rencontrent la paume de la main. Comme le poignet, ces articulations permettent l’abduction, l’adduction, l’extension et la flexion, mais pas la rotation, et comme le coude, les articulations des doigts à la base des phalanges ne peuvent généralement pas s’étendre très loin à partir d’une position redressée. Les principaux mouvements disponibles pour les articulations des doigts à la base des phalanges sont illustrés dans la figure 3.25. Chaque articulation des doigts à la base des phalanges peut généralement se déplacer indépendamment de l’autre, mais certains mouvements sont plus difficiles que d’autres.
Articulation interphalangienne
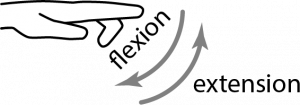
Les articulations interphalangiennes sont les différentes articulations entre les os individuels des doigts. Le pouce n’a qu’une seule articulation interphalangienne, tandis que les quatre autres doigts ont chacun deux articulations interphalangiennes. La plupart des humains ne peuvent pas facilement articuler séparément les deux articulations interphalangiennes d’un même doigt, c’est pourquoi elles sont généralement analysées ensemble dans le cadre des langues des signes. Comme le coude, les articulations interphalangiennes ne peuvent que s’étendre et se fléchir, comme le montre la figure 3.26, et elles ne peuvent généralement pas s’étendre beaucoup à partir d’une position redressée.
Décrire le mouvement manuel
Un aspect important de la description des mouvements manuels dans un signe est la capacité à identifier les articulations qui bougent et le type de mouvement qu’elles utilisent pour se déplacer. Cela peut s’avérer assez difficile, car de nombreuses articulations en langue des signes font appel à plusieurs articulations qui bougent de différentes manières. Dans la discussion qui suit, nous explorons quelques exemples de signes de l’ASL pour déterminer le type de mouvement qui se produit.
Examinez d’abord le signe SORRY (désolé) de l’ASL dans le clip vidéo suivant.
Le contenu suivant est en anglais.
Tout d’abord, il faut noter que la main doit remonter jusqu’à la poitrine avant que le signe ne commence. Ce mouvement n’est pas vraiment considéré comme faisant partie du signe. Cela ressemble à la façon dont les phones sont articulés. Pour réaliser une occlusive alvéolaire comme [t], la pointe de la langue doit être en contact total avec la crête alvéolaire. Le mouvement vers la crête alvéolaire ne fait pas partie de [t] en soi, mais est un mouvement accessoire nécessaire pour se préparer à articuler [t]. Nous pouvons constater que ce mouvement ne fait pas partie de [t] en raison du comportement ou des mots comme ant [ænt]. Comme la pointe de la langue est déjà sur la crête alvéolaire pour [n], il n’est pas nécessaire de l’éloigner et de la ramener pour [t]. Il en va de même pour le mouvement de positionnement du début de SORRY, ainsi que pour le mouvement final de retour des mains en position basse. Nous ne nous intéressons qu’au mouvement principal qui se produit pendant le signe lui-même, et non au mouvement de transition vers le signe ou en dehors de celui-ci. Parfois, il peut être difficile de déterminer si un mouvement est un mouvement de transition accessoire ou non, mais la plupart du temps, les mouvements initiaux et finaux qui peuvent être ignorés devraient être clairs.
Considérons maintenant l’articulation de la main. Elle prend la forme d’un poing rigide, ce qui nécessite la flexion des articulations des doigts à la base des phalanges et des articulations interphalangiennes (à l’exception du pouce, qui est étendu). Cependant, il s’agit d’une configuration fixe, et non d’un mouvement, et nous pouvons donc ignorer ces articulations. Le mouvement proprement dit est celui de la main qui trace un petit cercle sur la poitrine. Il ne semble pas non plus y avoir de mouvement important au niveau du poignet ou des articulations radio-ulnaires, puisque l’ensemble de l’avant-bras jusqu’à la main et les doigts agissent comme une seule unité fixe. Nous pouvons donc également ignorer ces deux articulations.
Le coude et l’épaule sont donc les articulations qui nous intéressent pour les mouvements manuels. En observant attentivement le coude, on constate qu’il se fléchit et s’étend légèrement pendant le cercle, ce qui entraîne une modification de l’angle entre la partie supérieure du bras et l’avant-bras. En outre, le coude lui-même change de position dans l’espace, se déplaçant légèrement vers le côté droit du signeur et revenant en arrière. Cela ne peut pas être dû au mouvement du coude, car le mouvement d’une articulation ne peut pas modifier la position de l’articulation elle-même, mais plutôt la position des autres parties du corps auxquelles elle est reliée. Il doit donc y avoir un autre mouvement ailleurs, et la seule articulation qu’il nous reste est l’épaule. Le mouvement pertinent de l’épaule semble être une petite quantité d’abduction et d’adduction, peut-être combinée à une très légère flexion et extension.
Ainsi, nous dirions que SORRY en ASL implique un mouvement du coude et de l’épaule, et si nous devons être plus précis, nous dirions qu’il y a une flexion et une extension répétées du coude, et une abduction et une adduction répétées de l’épaule, et peut-être aussi une certaine quantité de flexion et d’extension répétées de l’épaule.
Examinez d’abord le signe APPLE (pomme) de l’ASL dans le clip vidéo suivant.
Le contenu suivant est en anglais.
Une fois de plus, nous devons ignorer les mouvements de transition vers le signe et hors de celui-ci, et comme pour DÉSOLÉ, nous voyons que la main dans POMME a une forme fixe, cette fois avec l’index étendu à l’articulation du doigt à la base de la phalange, mais fléchi au niveau des articulations interphalangiennes, tandis que tous les autres doigts sont fermés de manière lâche avec les articulations des doigts à la base des phalanges et les articulations interphalangiennes fléchies.
Pour POMME, il y a un mouvement de l’avant-bras sous forme de rotation. Nous savons que le poignet ne peut pas tourner, il doit donc s’agir d’une rotation radio-ulnaire. Puisqu’il n’y a pas d’autre mouvement, nous pouvons ignorer les articulations du coude et de l’épaule.
Ainsi, pour POMME en ASL, on dira qu’il n’a qu’un mouvement radio-ulnaire, et plus précisément qu’il a une rotation radio-ulnaire répétée.
Examinez d’abord le signe CHOISIR de l’ASL dans la vidéo suivante.
Le contenu suivant est en anglais.
Dans le cas de CHOISIR, le mouvement initial de transition semble presque faire partie du signe, avec la main qui se lève, puis qui tourne vers l’arrière, le tout faisant partie d’un même mouvement. Dans ce cas particulier, nous pouvons ignorer ce relèvement initial, mais en général, il peut être difficile de savoir s’il faut l’ignorer ou non.
Les mouvements de base qui nous intéressent ici sont les mouvements des doigts et le mouvement du poignet vers l’arrière. En ce qui concerne le mouvement des doigts, nous constatons que l’index et le pouce se rejoignent dans un mouvement de pincement. Cela nécessite une flexion des articulations des doigts à la base des phalanges et peut-être une très petite flexion interphalangienne. Le mouvement du poignet vers l’arrière est articulé en étendant le poignet vers l’arrière. Il n’y a pas de torsion radio-ulnaire ni de mouvement notable du coude ou de l’épaule.
Ainsi, pour CHOISIR en ASL, nous dirions qu’il y a un mouvement de base et radio-ulnaire, et peut-être un mouvement interphalangien mineur, et plus précisément, qu’il y a une flexion non répétée de base (et peut-être interphalangienne) et une extension du poignet.
Articulateurs non manuels
Le reste du corps, les articulateurs non manuels, en particulier le torse et les parties du visage, présentent des mouvements complexes et variés, tels que la direction du regard, l’ouverture des paupières, l’élévation ou l’abaissement des sourcils, l’inclinaison ou la rotation du torse, l’inclinaison ou la rotation de la tête, le gonflement des joues, l’arrondissement ou l’écartement des lèvres, le dévoilement des dents, etc. Presque toutes les autres parties du corps peuvent être des articulateurs non manuels, y compris les pieds et les fesses dans certaines langues des signes, comme la langue des signes Adamorobe au Ghana (Nyst 2007) et le Kata Kolok en Indonésie (Marsaja 2008).
Si vous regardez le signe DÉSOLÉ en ASL, vous devriez remarquer certaines de ces articulations non manuelles. Le signeur fronce les sourcils, serre les lèvres, gonfle légèrement les joues et secoue lentement la tête. Tous ces mouvements non manuels font partie du signe. Pour un signe donné, les articulations non manuelles peuvent ne pas être toutes nécessaires à la compréhension du signe, mais elles font toujours partie de son articulation.
L’articulation non manuelle dépasse le cadre d’un manuel d’introduction comme celui-ci, mais elle joue un rôle crucial dans les langues des signes et ne peut être ignorée dans une analyse complète de ces dernières. C’est l’un des inconvénients des outils tels que les « gants de langue des signes », qui apparaissent régulièrement dans les médias populaires (un exemple typique est présenté dans Chin, 2020). Comme ces gants ne saisissent que certains aspects de l’articulation manuelle, mais pas du tout l’articulation non manuelle, ils ne peuvent pas traduire complètement les langues des signes. Voir Hill (2020) pour un examen plus approfondi de cette question, en particulier la nécessité pour les créateurs d’impliquer les personnes sourdes lors de la conception de la technologie des langues des signes, afin de s’assurer que la technologie est réellement utile aux personnes sourdes.
Vérifiez votre compréhension
À venir!
Références
Chin, Matthew. 2020. Wearable-tech glove translates sign language into speech in real time. UCLA Newsroom. https://newsroom.ucla.edu/releases/glove-translates-sign-language-to-speech
Hill, Joseph. 2020. Do deaf communities actually want sign language gloves? Nature Electronics 3(9): 512–513.
Marsaja, I. Gede. 2008. Desa Kolok — A deaf village and its sign language in Bali, Indonesia. Nijmegen: Ishara Press.
Nyst, Victoria. 2007. A descriptive analysis of Adamorobe Sign Language (Ghana). Thèse, University of Amsterdam PhD.
