5
5.1. Siêu phẳng
Một siêu phẳng là một tập hợp được mô tả bằng một đẳng thức tích vô hướng duy nhất. Chính xác hơn, một siêu phẳng trong [latex]\mathbb{R}^n[/latex] là một tập hợp có dạng
[latex]\begin{align*} \mathbf{H} = {x: a^Tx = b}, \end{align*}[/latex]
trong đó [latex]a \in \mathbb{R}^n[/latex], [latex]a \neq 0[/latex], và [latex]b \in \mathbb{R}[/latex] được cho. Khi [latex]b=0[/latex], siêu phẳng đơn giản là tập hợp các điểm trực giao với [latex]a[/latex]; khi [latex]b \neq 0[/latex], siêu phẳng là một phép tịnh tiến, theo hướng [latex]a[/latex], của tập hợp đó.
Nếu [latex]x_0 \in {\bf H}[/latex], thì với bất kỳ phần tử [latex]x \in {\bf H}[/latex] nào khác, chúng ta có
[latex]\begin{align*} b = a^Tx_0 = a^Tx. \end{align*}[/latex]
Do đó, siêu phẳng có thể được đặc trưng là tập hợp các vector [latex]x[/latex] sao cho [latex]x - x_0[/latex] trực giao với [latex]a[/latex]:
[latex]\begin{align*} \mathbf{H} = {x: a^T(x-x_0) = 0}. \end{align*}[/latex]
Siêu phẳng là các tập afin, có chiều [latex]n-1[/latex]. Do đó, chúng tổng quát hóa khái niệm thông thường về một mặt phẳng trong [latex]\mathbb{R}^3[/latex]. Siêu phẳng rất hữu ích vì chúng cho phép chia không gian thành hai vùng. Điều đó dẫn tới khái niệm về bán không gian.
| Ví dụ 1:
Một siêu phẳng trong [latex]\mathbb{R}^3[/latex]. Xét một tập afin có chiều \(2\) trong \(\mathbb{R}^3\), mà chúng ta mô tả là tập hợp các điểm \(x\) trong \(\mathbb{R}^3\) sao cho tồn tại hai tham số \(\lambda_1, \lambda_2\) sao cho \[ x = \begin{pmatrix} 3\lambda_1-4\lambda_2 + 4 \ \lambda_1 \ \lambda_2 \end{pmatrix} = \begin{pmatrix} 4 \ 0 \ 0 \end{pmatrix} + \lambda_1 \begin{pmatrix} 3 \ 1 \ 0 \end{pmatrix} + \lambda_2 \begin{pmatrix} -4 \ 0 \ 1 \end{pmatrix}. \] Do đó, tập \(\mathbf{H}\) có chiều \(2\) trong \(\mathbb{R}^3\), do đó nó là một siêu phẳng. Trong \(\mathbb{R}^3\), siêu phẳng là các mặt phẳng thông thường. Chúng ta có thể tìm một biểu diễn của siêu phẳng ở dạng chuẩn
|
||
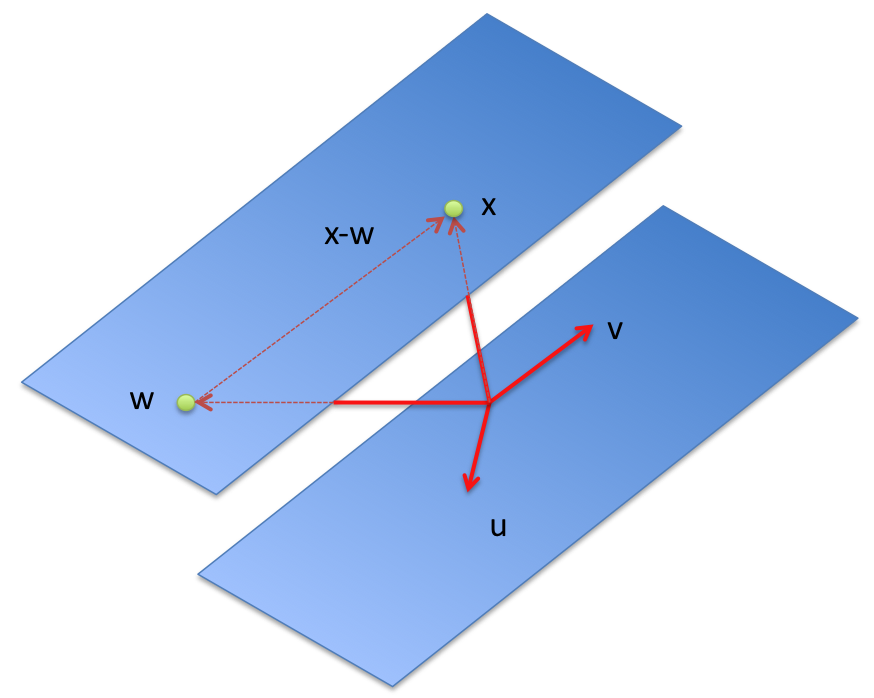 |
Siêu phẳng (\mathbf{H}) có thể được biểu diễn là (x_0 + \mathbf{span}(u, v)), trong đó (x_0) là một phần tử cụ thể, và (u, v) là hai vector độc lập. Tập (\mathbf{H}) được biểu diễn bằng màu xanh lam nhạt; nó là một phép tịnh tiến của không gian sinh tương ứng (\mathbf{L} = \mathbf{span}(u, v)). Bất kỳ điểm (x) nào trong (\mathbf{H}) đều thỏa mãn (x - x_0) thuộc (\mathbf{L}). Do đó, chúng ta có thể biểu diễn siêu phẳng là tập hợp các điểm sao cho (x - x_0) trực giao với (a), trong đó (a) là bất kỳ vector nào trực giao với cả (u, v). | |
5.2. Phép chiếu lên siêu phẳng
Xét siêu phẳng [latex]{\bf H} = {x: a^Tx = b}[/latex], và giả sử không mất tính tổng quát rằng [latex]a[/latex] đã được chuẩn hóa ([latex]||a||2 =1[/latex]). Chúng ta có thể biểu diễn [latex]{\bf H}[/latex] là tập hợp các điểm [latex]x[/latex] sao cho [latex]x- x_0[/latex] trực giao với [latex]a[/latex], trong đó [latex]x_0[/latex] là bất kỳ vector nào trong [latex]{\bf H}[/latex], tức là sao cho [latex]a^Tx_0 = b[/latex]. Một vector như vậy là [latex]x{proj}:= ba[/latex].
Theo cấu trúc, [latex]x_{proj}[/latex] là phép chiếu của [latex]0[/latex] lên [latex]{\bf H}[/latex]. Tức là, nó là điểm trên [latex]{\bf H}[/latex] gần gốc tọa độ nhất, vì nó giải bài toán chiếu
[latex]\begin{align*} \min\limits_x ||x||_2: x \in \mathbf{H} \end{align*}[/latex]
Thật vậy, với bất kỳ [latex]x \in {\bf H}[/latex] nào, sử dụng bất đẳng thức Cauchy-Schwartz:
[latex]\begin{align*} ||x_0||_2 = |b| = |a^Tx| \leq ||a||_2 \cdot ||x||_2 = ||x||2, \end{align*}[/latex]
và độ dài nhỏ nhất |[latex]b[/latex]| đạt được với [latex]x{proj} = ba[/latex].
5.3. Hình học của siêu phẳng
|
|
Về mặt hình học, một siêu phẳng [latex]{\bf H} = {x: a^Tx = b}[/latex], với [latex]||a||_2 = 1[/latex], là một phép tịnh tiến của tập hợp các vector trực giao với [latex]a[/latex]. Hướng của phép tịnh tiến được xác định bởi [latex]a[/latex], và độ lớn bởi [latex]b[/latex]. Chính xác hơn, |[latex]b[/latex]| là độ dài của điểm gần nhất [latex]x_0[/latex] trên [latex]{\bf H}[/latex] từ gốc tọa độ, và dấu của [latex]b[/latex] xác định xem [latex]{\bf H}[/latex] có ở xa gốc tọa độ theo hướng [latex]a[/latex] hay [latex]-a[/latex]. Khi chúng ta tăng độ lớn của [latex]b[/latex], siêu phẳng sẽ dịch chuyển ra xa hơn theo [latex]\pm a[/latex], tùy thuộc vào dấu của [latex]b[/latex]. Trong không gian 3D, một siêu phẳng tương ứng với một mặt phẳng. Trong hình ảnh bên trái, số vô hướng [latex]b[/latex] là dương, vì [latex]x_0[/latex] và [latex]a[/latex] chỉ cùng một hướng. |

5.4. Bán không gian
Một bán không gian là một tập hợp con của [latex]\mathbb{R}^n[/latex] được xác định bằng một bất đẳng thức duy nhất liên quan đến một tích vô hướng. Chính xác hơn, một nửa không gian trong [latex]\mathbb{R}^n[/latex] là một tập hợp có dạng
[latex]\begin{align*} \mathbf{H} = {x: a^Tx \ge b}, \end{align*}[/latex]
trong đó [latex]a \in \mathbb{R}^n[/latex], [latex]a \neq 0[/latex], và [latex]b \in \mathbb{R}[/latex] được cho.
Về mặt hình học, nửa không gian ở trên là tập hợp các điểm sao cho [latex]{a^T(x-x_0) \ge 0[/latex], tức là, góc giữa [latex]x - x_0[/latex] và [latex]a[/latex] là góc nhọn (trong [latex][-90^{\circ}; +90^{\circ}][/latex]). Ở đây [latex]x_0[/latex] là điểm gần gốc tọa độ nhất trên siêu phẳng được xác định bởi đẳng thức [latex]a^Tx = b[/latex]. (Khi [latex]a[/latex] đã được chuẩn hóa, như trong hình, [latex]x_0 = ba[/latex].)
 |
|
| Bán không gian [latex]{x: a^Tx \ge b},[/latex] là tập hợp các điểm sao cho [latex]x-x_0[/latex] tạo thành một góc nhọn với [latex]a[/latex], trong đó [latex]x_0[/latex] là phép chiếu của gốc tọa độ lên biên của nửa không gian. | |
|
Hình bên trái mô tả một bán không gian trong trường hợp không gian ba chiều.
|
|
